在当今汽车电子系统的开发中,CAN总线作为车辆内部通信的骨干,承载着大量关键信号的传输。确保这些信号的高效、准确处理,对于车辆系统的稳定性和可靠性至关重要。
一、SignalConfigFilterEditor
信号配置过滤器编辑器(SignalConfigFilterEditor,简称SCFE),是ADTF(AutomotiveDataandTime-TriggeredFramework)设备工具箱3中的高效组件,它允许我们从总线数据库文件中选择信号和参数,并将它们映射到为CAN、CANFD或FlexRay等配置的编解码器过滤器的引脚上,如图1所示。
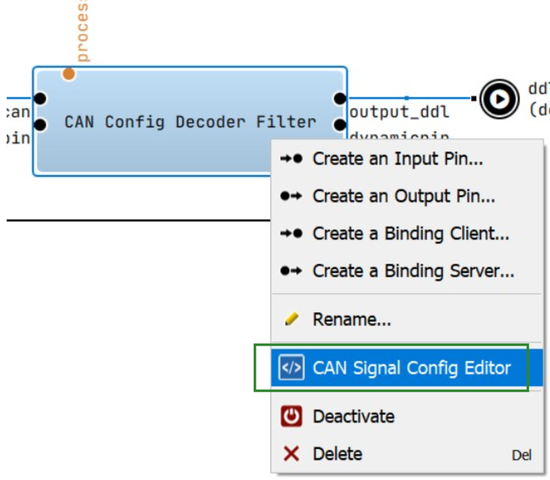
图1:SCFE
SCFE支持图形界面操作,用于配置编解码器过滤器。通过它,我们可以创建新的映射文件,选择信号,并将其映射到输出引脚上,从而实现对汽车中各种信号的解码和编码,如图2所示。
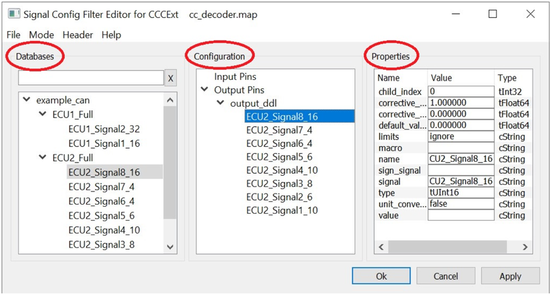
图2:SCFE操作界面
SCFE的主要功能包括:
从总线数据库中选择信号和参数,实现个性化配置。
将选定信号映射到输入或输出引脚,实现信号的精确控制。
生成映射文件,定义信号与引脚的映射关系,便于管理和复用。
设置引脚属性,包括通道、时间戳、延迟和打包等,以适应不同的通信需求。
编辑信号属性,如位长、校正因子和默认值,确保信号的准确性。
定义结构体和数组,使得多个信号可以作为一个整体进行处理。
设置触发器,根据特定条件控制信号的发送时机。
提供配置检查功能,帮助用户发现并修正潜在的错误。
二、快速原型制作
在ADTFDeviceToolbox3工具箱中,提供多个组件进行总线服务、解析、追踪可视化和处理等功能。结合SCFE组件功能,我们可以简易更快搭建工程,实现总线数据的解析和处理。比如搭建CANFD信号进行DBC编译工程,如图3所示。
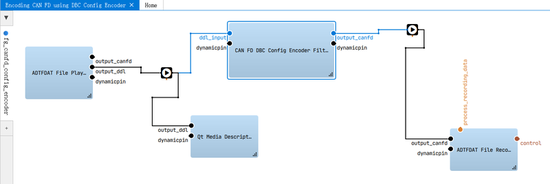
图3:CAN FD DBC Config Encoder工程
在SCFE中可以信号引脚,属性等功能进行配置,如下图4所示。
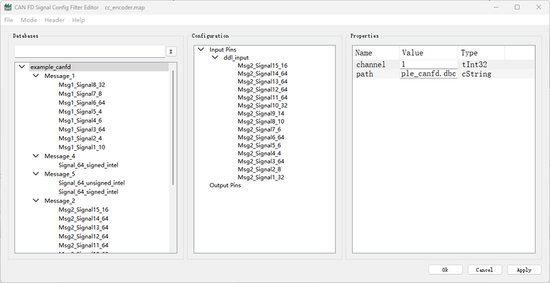
图4:SCFE配置
运行效果图5所示:

图5:工程运行效果
三、数据库解析SDK
在ADTFDeviceToolbox3工具箱中,进一步提供了自定义总线数据库解析器SDK,如图6所示。支持开发者实现和部署针对特定总线通信协议的数据库解析服务。
图6:数据库解析SDK
这一SDK具备以下特点:
支持特殊文件格式的解析,满足非标准通信数据库文件的读取需求。
通过实现特定接口,构建灵活的解析服务,加载和处理通信规范。
采用接口驱动设计,定义了数据库加载器、特定于总线的数据库接口和DBC数据库解析接口,确保兼容性和功能实现。
通过数据库注册表管理不同总线类型的数据库加载器实例,确保数据库文件的正确加载和解析。
ADTFDeviceToolbox3通过SignalConfigFilterEditor(SCFE)和数据库解析SDK,为汽车电子领域总线方面提供了一套工具链。在汽车研发阶段,SCFE用于配置信号,测试和验证通信系统的性能;在车辆故障诊断中,SCFE助力快速定位问题信号,提升诊断效率;在系统集成过程中,SCFE确保不同系统间的信号正确交互,避免通信冲突。这些工具不仅提高开发效率,也确保汽车电子系统的稳定性和可靠性。
上一篇:康谋分享 | 自动驾驶联合仿真——功能模型接口FMI(二)
下一篇:展频晶振在行车记录仪中的应用
推荐阅读最新更新时间:2026-03-17 11:04

 Altium Designer26库(schLib/pcbLib)安装与封装关联排查指南
Altium Designer26库(schLib/pcbLib)安装与封装关联排查指南 【2025 DigiKey创意大赛】CAN控制的直流电源--源代码
【2025 DigiKey创意大赛】CAN控制的直流电源--源代码 现代雷达系统的信号设计
现代雷达系统的信号设计- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- VPU中的“六边形战士”:安谋科技Arm China发布“玲珑”V560/V760 VPU IP
- 利用锚定可信平台模块(TPM)的FPGA构建人形机器人安全

- DC757A-A,使用 LTC4302CMS-1 可寻址 2 线总线缓冲器和电源电平转换的演示板
- 使用 Microchip Technology 的 MIC2871YMK 的参考设计
- DVK-SFJK-1-GEVK,基于AX-SFJK收发器的RCZ3的Sigfox AT开发套件
- 汽车后视镜控制设计
- AM2G-4805DH30Z ±5V 2 瓦 DC/DC 转换器的典型应用
- DC1067A-A,LTC2450IDC 演示板,16 位高性能,Delta Sigma 模数转换器
- AM2G-2407DH30Z ±7.2V 2 瓦 DC/DC 转换器的典型应用
- 使用 Cypress Semiconductor 的 S6AP413A29GN1C000 的参考设计
- 升压变压器设计中的寄生电容效应
- snapVCC:3.3/5 V 超高效稳压器,可直接安装在您的 9 V 电池上(含原理图、PCB等)

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号