自动驾驶技术领域正在迅速发展。从2024年到2030年,每年出货的高自动化车辆数量预计将以41%的复合年增长率增长。这一快速增长导致汽车品牌对精确可靠的传感器技术提出了前所未有的需求,因为他们可以提供准确、可信且最终能够实现完全自动驾驶的解决方案。
为了实现这一目标,激光雷达(LiDAR)传感器已成为汽车制造商和汽车设备供应商不可或缺的工具。它们能够通过能提供足够分辨率进行深度感知和距离检测来实现“路况读取”,从而对物体进行分类。
然而,随着我们进入下一代自动驾驶解决方案——从最新的主动安全系统创新到无人驾驶车辆——LiDAR等边缘系统的能力必须得到扩展,以便提供更高的深度分辨率和可靠性,从而应对日益复杂的场景。
融和FPGA和自适应SoC等自适应计算技术,使企业能够构建全面感知平台。这样的平台能够以极高的精度在复杂的驾驶环境中进行导航并识别潜在危险。
LiDAR系统架构类型 在观察LiDAR系统时,主要存在三种架构类型:机械式(非固态)、MEMS式(半固态)和闪光式(固态)。每种架构都根据其应用场景具有它们的优缺点。 机械式系统是目前部署最为广泛的系统(如表1所示)。这一系统使用旋转发射器发送光波,光波从物体上反射回来并被接收器接收。发射器以极快的速度旋转,以实现360度的视野,即点云。这一系统的优势在于具有较远的探测距离和广阔的视野,但缺点是体积较大且成本高昂。 表1:机械式(非固态) MEMS型采用发射器和反射镜系统来偏转光线,从而取代了大型机械旋转式激光雷达(如表2所示)。它目前常用于自动驾驶应用中。这一系统具有更小体积、更轻重量以及更高成本效益,但它们的视野范围相对有限,且容易受到冲击和振动的影响。 表2:MEMS式(半固态) 闪光式系统为固态系统,包括使用一系列光学天线以不同角度辐射光线的光学相控阵(OPA)系统(如表3所示)。这种较新的解决方案的视野范围也有限,因此需要安装多个单元才能覆盖完整的360度范围。 表3:闪光式(固态) 如AMD这样的公司,它可以提供FPGA和自适应计算设备,使这些LiDAR系统和应用得以实现。无论采用何种技术,FPGA和自适应计算设备都能满足LiDAR领域在尺寸、成本和分辨率方面的各种实施需求。 克服时序抖动 LiDAR的价值在于其能够提供图像分类、分割和物体检测数据,这些对于通过人工智能(AI)增强的3D视觉感知至关重要。仅凭摄像头无法实现如此精度的数据提供,尤其是在恶劣天气或光线不足的情况下,这就是为什么LiDAR已成为自动驾驶不可或缺的技术。 然而,LiDAR仍需克服多重挑战,其中包括时序抖动。当激光脉冲的时序或位置发生波动时,会影响生成图像的质量,进而妨碍物体识别和深度分辨率。LiDAR在自动驾驶中的作用将持续扩大,因此对该技术的持续改进也至关重要。 自适应计算技术可以支持减少时序抖动并提高分辨率,这得益于能够实现更快数据处理的FPGA。FPGA提供了优化数据路径和内存层次的灵活性,以减少延迟,并卸载调整脉冲时序以最小化波动的AI引擎。最终,抖动值越小,传感器和雷达检测识别物体的准确性就越高。 LiDAR架构的演进与扩展 目前,很多在生产的车辆可能仅配备一个前向LiDAR。但这一情况正在改变,因为下一代车辆将配备多个系统,包括前向、后向和侧视LiDAR,以更全面地覆盖道路及其周围环境。这一扩展的LiDAR传感器生态系统需要强大且高效的AI计算平台。这些平台将处理和传输所生成的大量数据,并实现生态系统有效运行所需的高速连接和低延迟。 使用基于FPGA的多处理器片上系统(MPSoC)可以减小这些LiDAR设备的尺寸。由于FPGA针对边缘计算进行了优化,它们可以无缝集成并与多个系统高效集成,以应对当今自动驾驶解决方案中传感器数量激增的情况。通过减小系统尺寸和空间,MPSoC使多个LiDAR能够协同工作,生成车辆行驶路径的全面视图。 此外,由于基于FPGA的MPSoC在制造后具有重新编程的灵活性,因此可用于多个LiDAR系统,也包括未来的系统。这种适应性使汽车制造商能够降低系统成本并确保设计的未来兼容性,从而无需在下一代解决方案出现时彻底改造原始系统。 点云预处理与机器学习加速 点云图像是自动驾驶技术的核心,因为它能够通过结合对物体形状的单个测量值来创建图像。在某些情况下,企业正在使用多达128通道的数字多光束闪光LiDAR来生成这些丰富的点云图像。这需要功能强大的硬件,能够针对该任务进行优化,并具有提供图像和数字信号处理的能力。 例如,通过可编程逻辑(PL)中的高速串行收发器传输图像数据,可以实现高速连接和数据传输。虽然可以实现并行处理、时钟速度降低和功耗分散,但企业也必须在处理系统和PL之间使用高带宽连接,在软件和相关的硬件加速功能之间进行划分。 最终,这将在已经简化的传感器架构中生成包含深度、信号和环境数据的点云图像。这可以解锁更有效的信号处理以及LiDAR所需的高分辨率,以实现可靠的对象检测、高精度3D映射以及车辆在狭窄环境中工作时零厘米的最小范围。 预研用于目前与未来的传感器技术 随着LiDAR等传感器检测技术日益成为自动驾驶技术不可或缺的一部分,一个既强大又高效的处理平台对于实现安全关键功能所需的深度分辨率至关重要。自适应计算将AI引擎和FPGA相结合,优化了实现这一目标所需的物体检测和数据调整,以提供准确可靠的性能。 随着下一代解决方案的创建并发展成为自动驾驶体验中不可或缺的一部分,LiDAR生态系统将变得更加完善。随着车辆生命周期中部署的额外工作量增加,自适应计算所带来的灵活性可以推动所需的演进和创新。 例如,它可以使现场软件和硬件升级成为可能,从而提供LiDAR实现终端检测质量所需的处理能力和低延迟。或者,它还可以确保新的创新功能和算法,可以进行远程且安全地部署,以支持面向未来的设计。 实现当今和未来汽车应用场景中预期的传感器检测和深度分辨率所需的计算能力需要灵活性、强大的处理能力以及集成能力。此外,它还需要模块化,以最大限度地降低设计复杂性和成本,同时最大限度地提高准确性和可靠性。将自适应计算纳入LiDAR系统及其集成方式中,可以解锁支持完全自动驾驶所需的部署规模。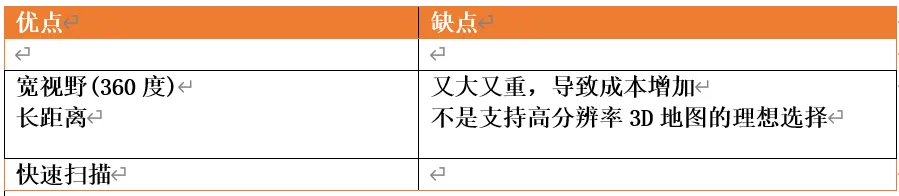


上一篇:纳芯微集成式电流传感器NSM211x:从工业到汽车
下一篇:村田推出高精度汽车用6轴惯性传感器
- 热门资源推荐
- 热门放大器推荐
 现代雷达系统的信号设计
现代雷达系统的信号设计 LTC6102HVHMS8
LTC6102HVHMS8
- 使用 ON Semiconductor 的 FAN2518S 的参考设计
- LTC1530S8、3.3V/3A 稳压器
- 使用 ON Semiconductor 的 ADP3167 的参考设计
- 使用 Analog Devices 的 LT3420EDD 的参考设计
- 基于Kinetis® M的低成本单相电表参考设计
- LTC3708、具有上升/下降轨跟踪功能的 2.5V/15A 和 1.2V/15A 稳压器
- NXQ1TXH5插件板
- 应变仪仪表放大器
- WRL-13287,基于 ESP8266 802.11 无线局域网的 SparkFun Wi-Fi Shield
- 4.1W、3-LED 通用 LED 照明驱动器

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号