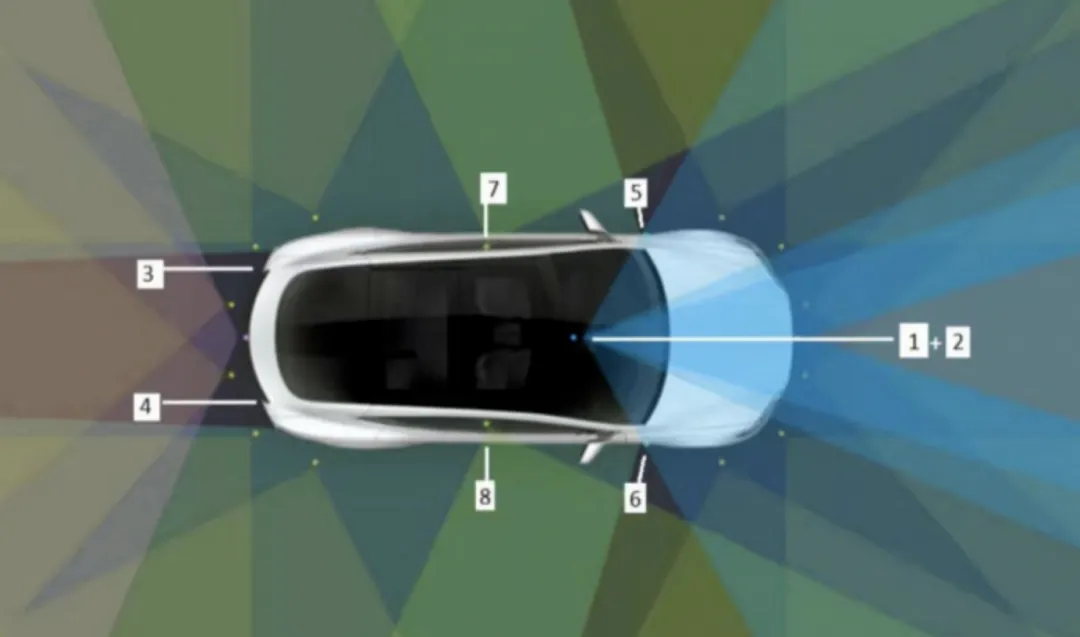
在自动驾驶方面,特斯拉使用的是纯视觉方案,即摄像头+算法,8个摄像头覆盖360°视野,汽车对目标的感知、以及选择行驶策略的根据,主要依靠摄像头捕捉的图像数据,能力高低,全凭算法决定。
不采用雷达这些东西,特别是激光雷达,完全不用。(具体拆解过程请原贴浏览:https://www.eeworld.com.cn/a50an90)
事实上,对于使用激光雷达,马斯克还有一句非常出名的吐槽,那就是“傻子才用激光雷达”。
为什么马斯克会这样说呢?我们先来了解下激光雷达的原理。
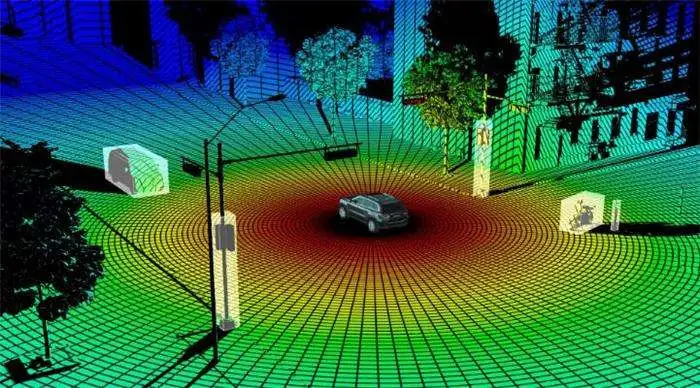
车用激光雷达工作原理就是蝙蝠测距用的回波时间(Time of Flight,缩写为TOF)测量方法。光速为每秒30万公里,要区分目标厘米级别的精确距离,那对传输时间测量分辨率必须做到 1 纳秒。激光雷达通过红外光束 Light Pluses 发射、反射和接收来探测物体,当激光光束遇到物体后,经过漫反射,返回至激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以 2,即可计算出发射器与物体的距离,但光束无法探测到被遮挡的物体。
在六、七年前,车用入门版64线激光雷达成本将近70万。这样的价格,作为大众消费品是不现实的。马斯克既是技术极客,也是一个精明的商人,他当然清楚百万豪车卖不上量。销量上不去数据就不够,算法就没法快速迭代。与其如此,不如干脆放弃激光雷达,就走纯视觉路线。
现在我们就不难理解,为什么当时马斯克要那样吐槽激光雷达了。
目前,华为、大疆、速腾、禾赛等等企业,利用国内得天独厚的供应链优势和市场规模效应,把激光雷达的成本迅速降到数千至万元级别。这个速度,是几年前谁都没料到的,直接导致美国Velodyne的业务在国内迅速收缩,裁撤了中国办公室,只保留代理。
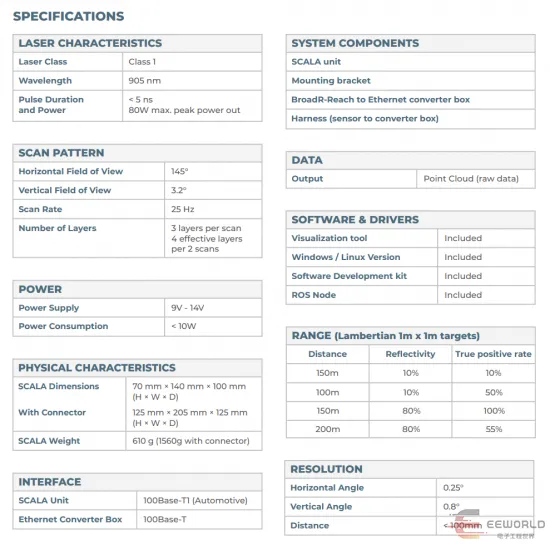
下面我们要拆的据说是世界上第一款车规级激光雷达,最早在奥迪A8上使用的Valeo产的SCALA 3D Laser Scanner (Gen 1)。

这款激光雷达使用905nm Class1激光器,最大水平视野145度,垂直视野3.2度。水平分辨率0.25度,垂直分辨率0.8度,距离分辨率<100mm。
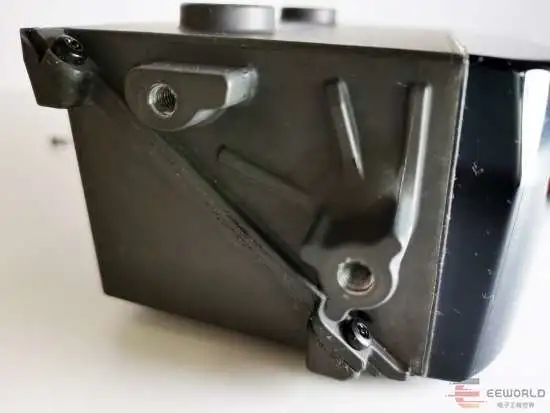
实物外观如下:


上下壳使用五角带孔螺丝固定。
拧下外壳上的4颗螺丝就能取下前面板,前面板内侧有一个电极和2个触点,有点像汽车后挡风上的加热丝,猜测是给面板加热用的。
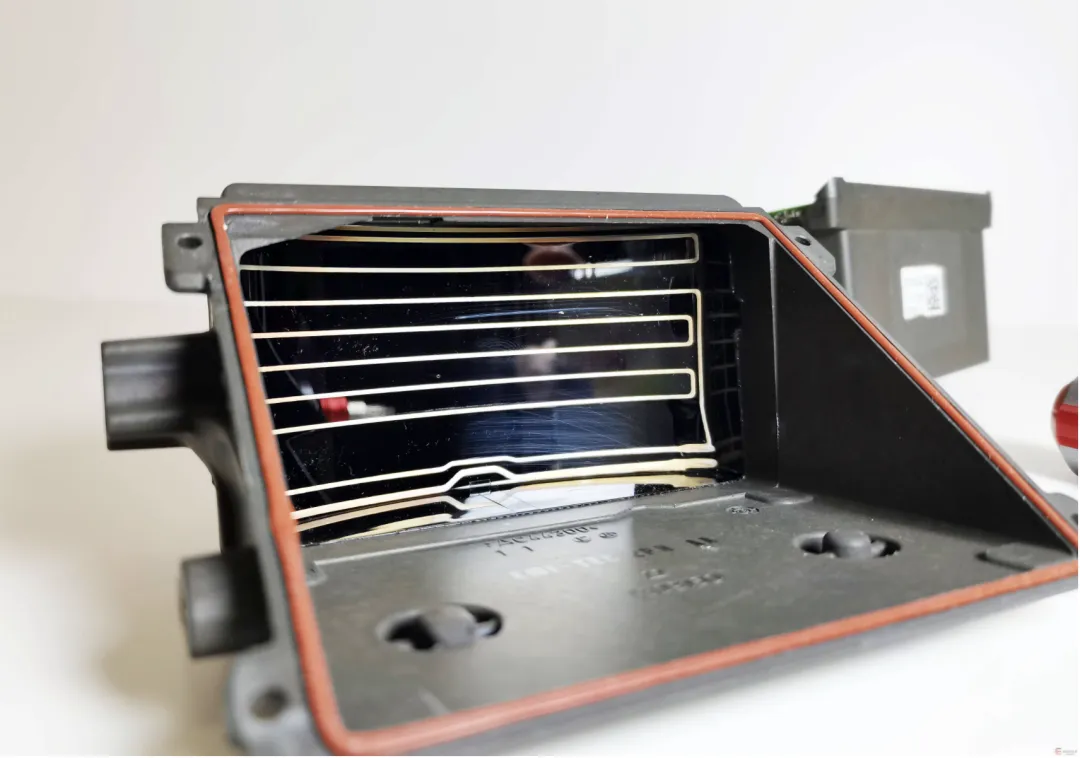
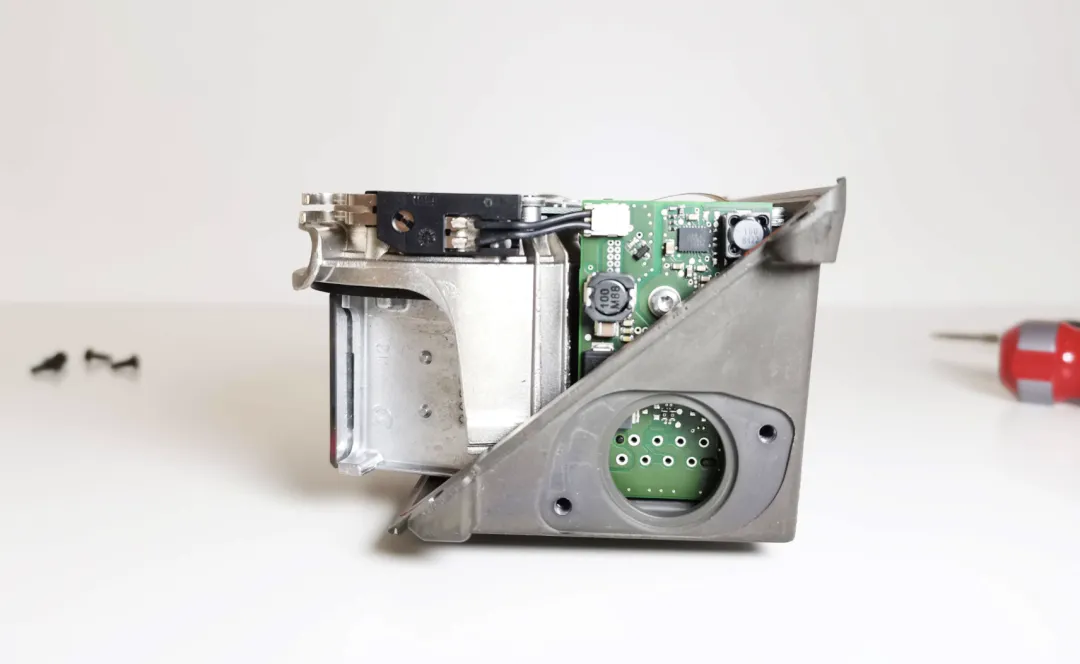
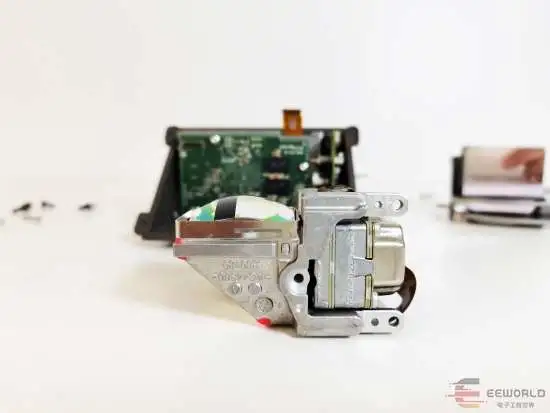
取下面板可以看到左侧的传感器和右侧的扫描镜。
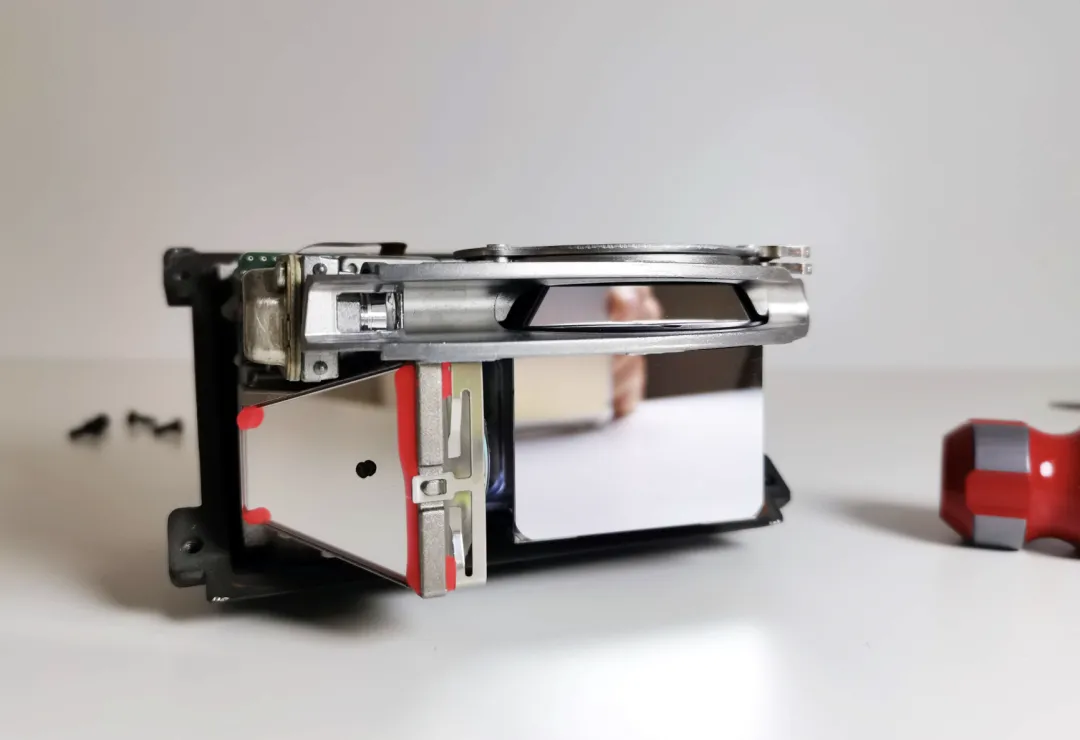
右侧的扫描镜有2个镜片,固定在一个电机上,镜片被金属支架分隔成2部分,上边窄的是用来把左边激光器发射的激光反射到被测物上的,下边宽的是用来将被测物反射回来的激光反射回左边的接收透镜,因为反射回来的激光比较弱,所以反射镜尺寸更大。

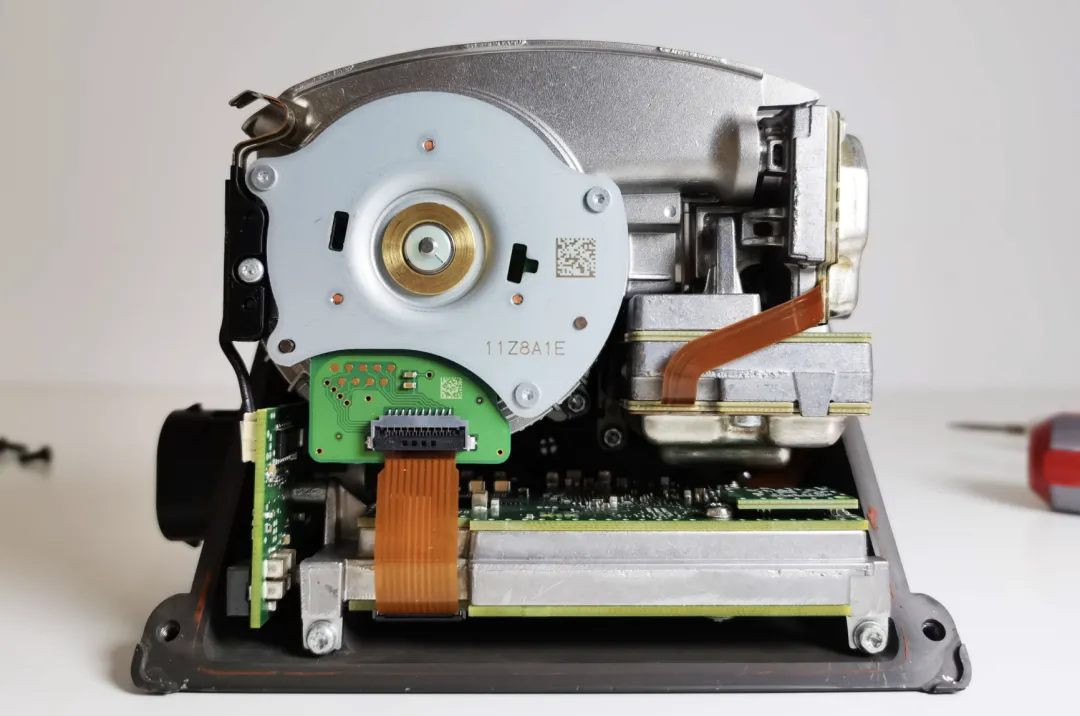
左侧的扫描镜电机和底部的主控板。
底部有一个气孔,上边原来有一个圆的挡片,撬开时崩飞了。

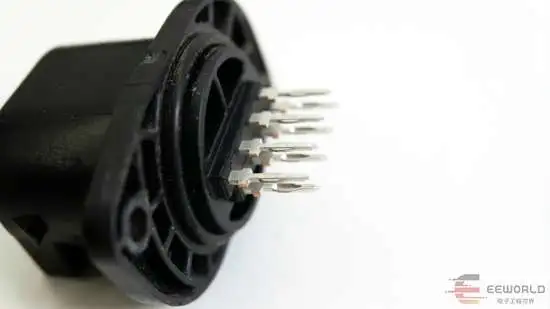
接口部分用的是press-fit连接器,用力撬就能取下。

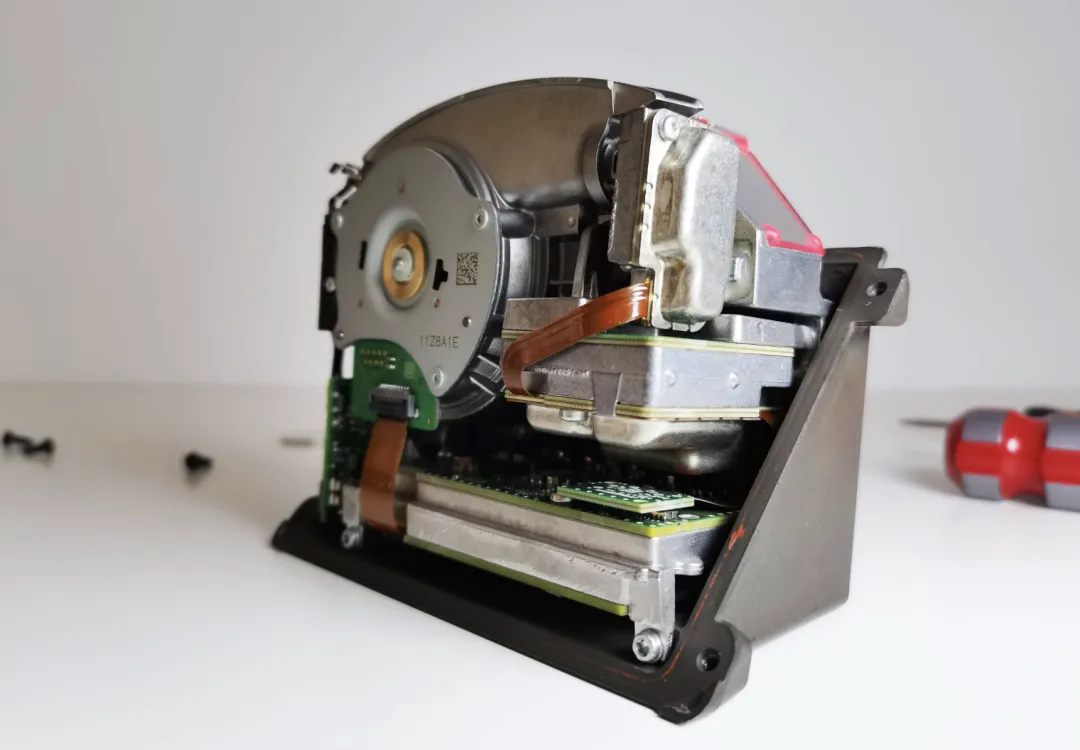
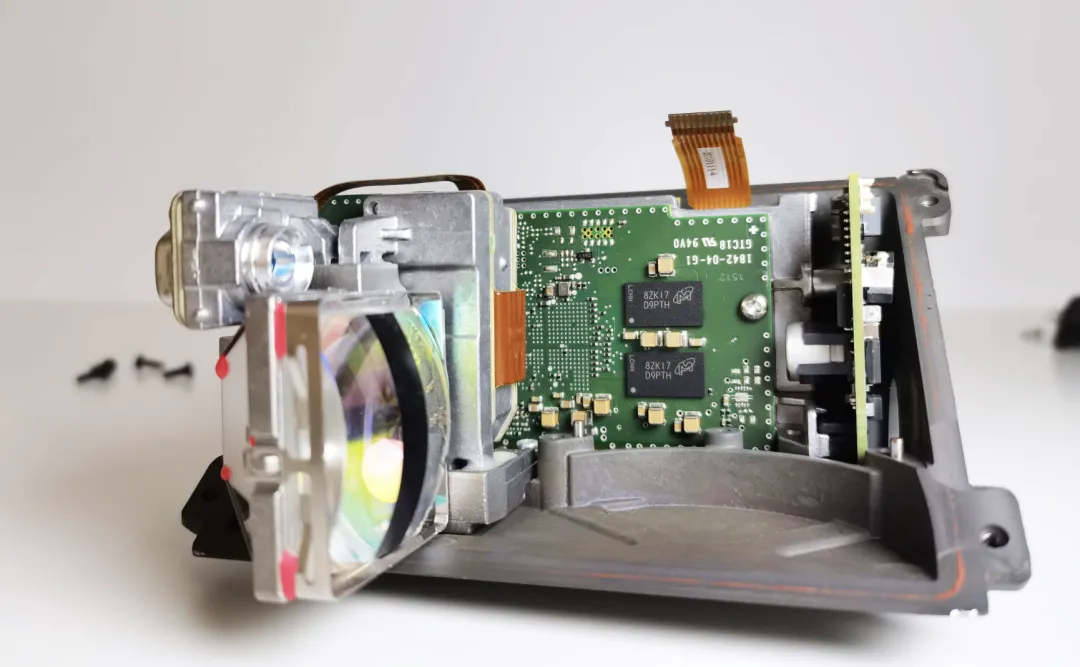
扫描镜通过3颗梅花螺丝固定,拆下扫描镜可以看到主板上的内存芯片。
扫描镜使用这种井字结构,左右各一个镜片。

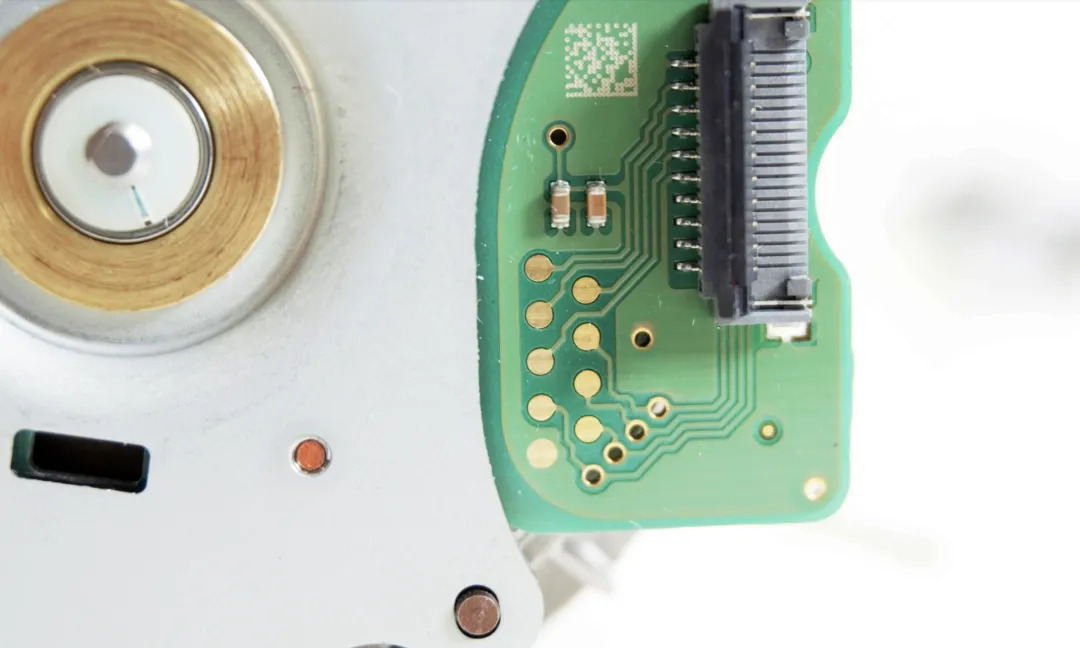
扫描镜通过8条导线和主板连接,内部可能有类似霍尔传感器的位置反馈器件。
传感器组件同样使用3颗梅花螺丝固定。

传感器组件背面。

传感器组件有一个4方形的透镜,中间使用一条黑胶带隔开,更大的镜头可以将更微弱的“回波”聚焦到内部的APD(雪崩光电二极管上)。

接收透镜顶部是一个激光器聚焦透镜。

传感器组件底部。
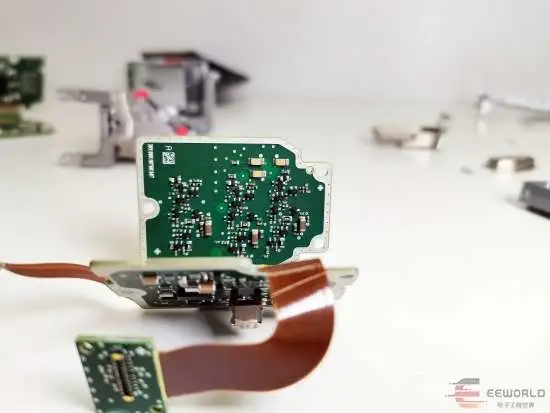
取下传感器组件,外壳上就只剩下一块主板,是一块由3部分组成的主板经过折弯固定在一个金属支架上的。
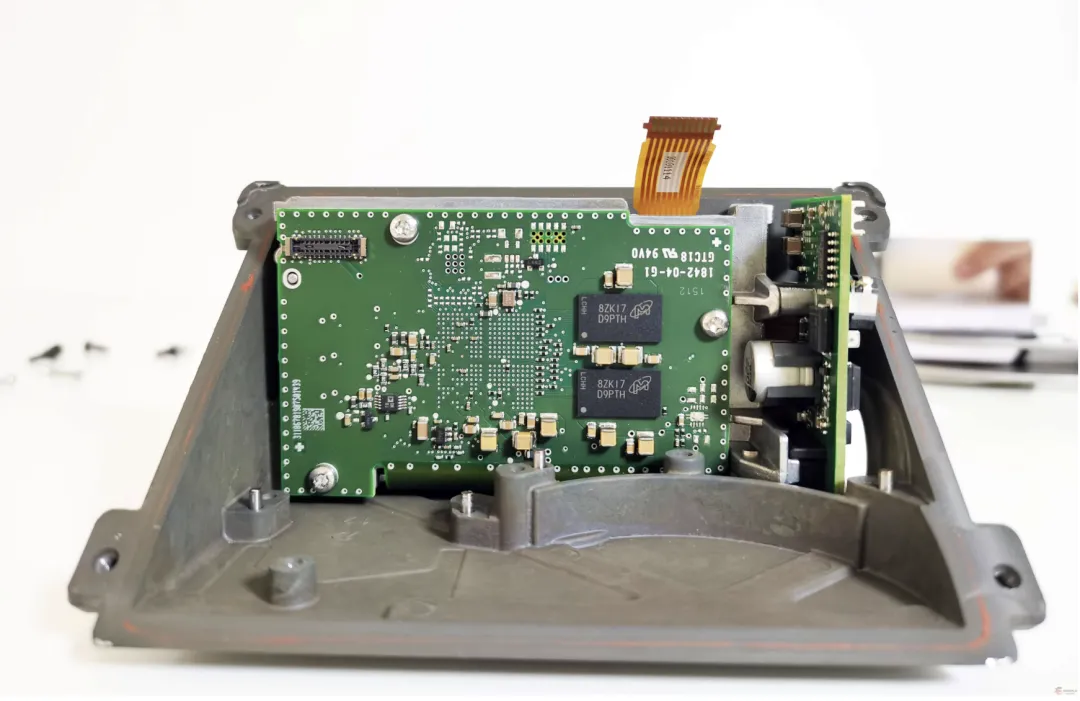

主板部分使用2颗螺丝固定在外壳上。

3块子板使用4颗螺丝固定在主板支架上。
去掉支架可以看到一块由3部分组成的主板。

这种设计比较特别,像是多层板在需要折弯的部分只保留一层或几层薄薄的部分。

主控型号是XILINX的XA7Z010,一款车规级ZYNQ FPGA。
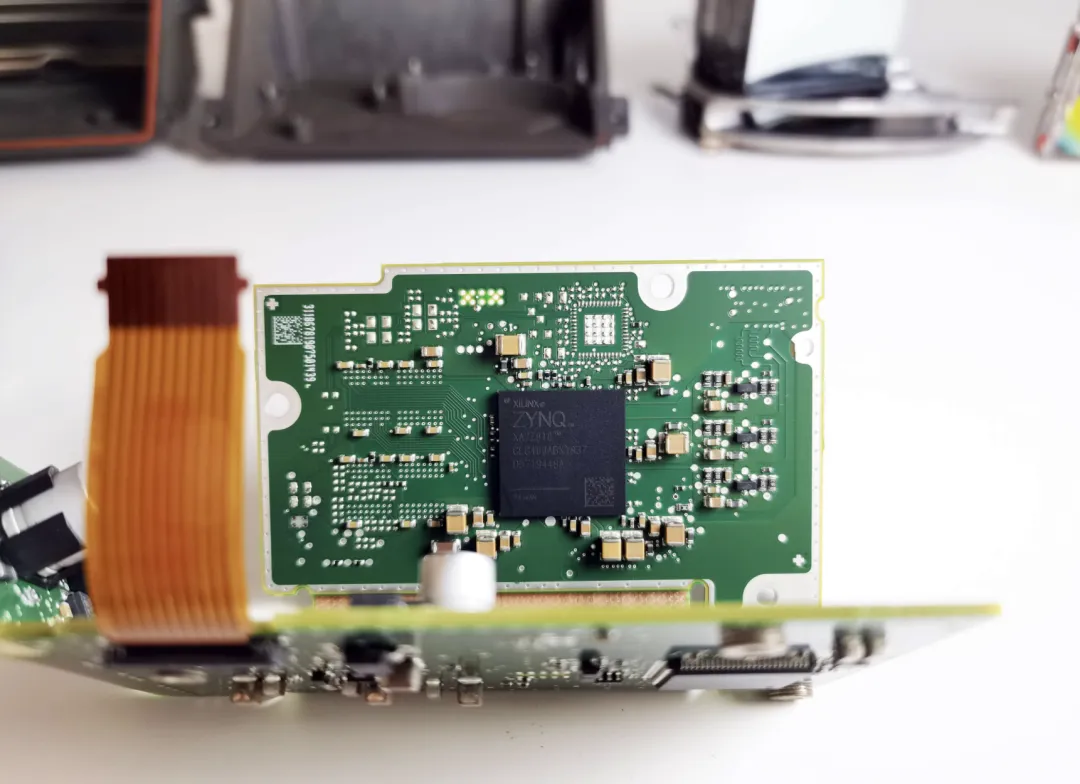
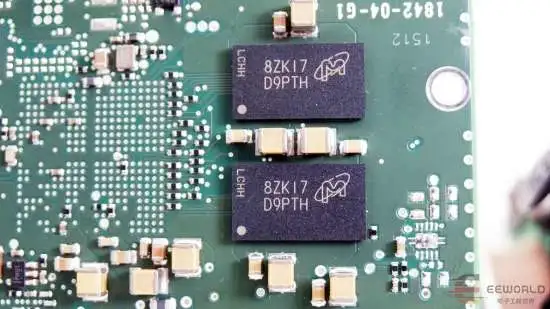
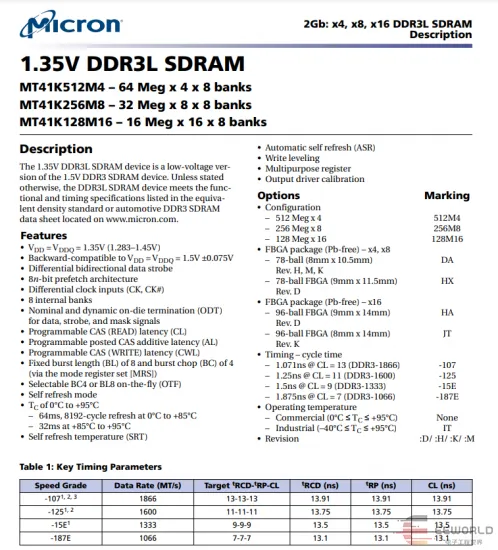
主控板FPGA部分器件比较少,除一颗ZYNQ外还有2颗丝印为D9PTH的MT41K128M16JT-125AAT,美光的128 Meg x 16DDR3L SDRAM。
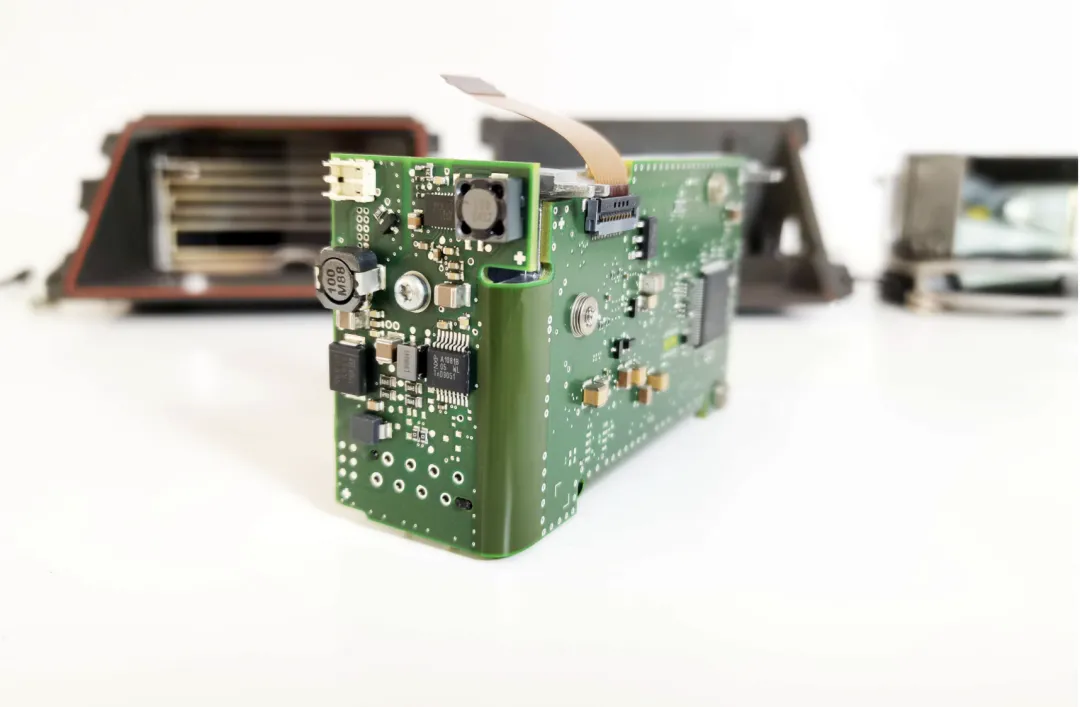
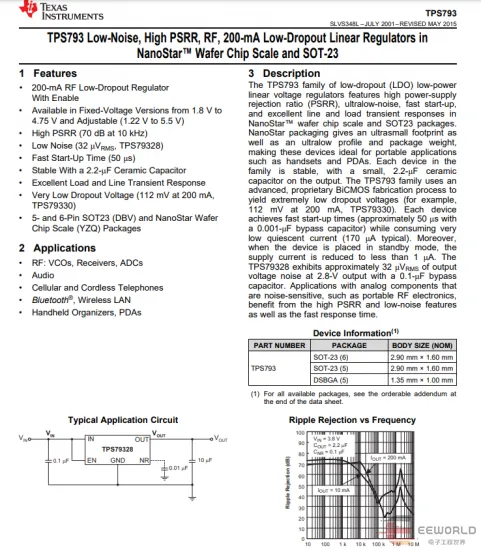
主控板其它部分包含一颗丝印为PHU1的TPS793333QDBVRQ1,TI公司的具有使能功能的 200mA、低压降稳压器。
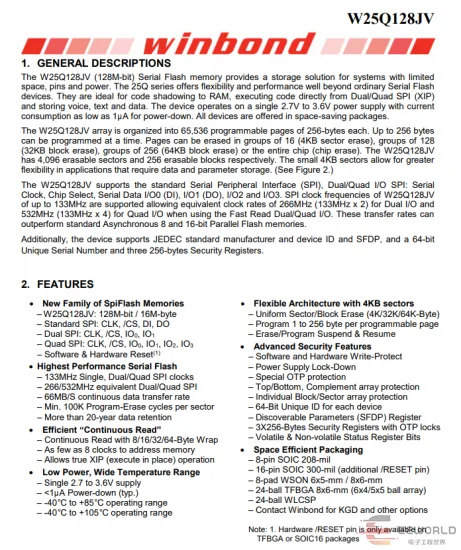
一颗25Q128闪存。

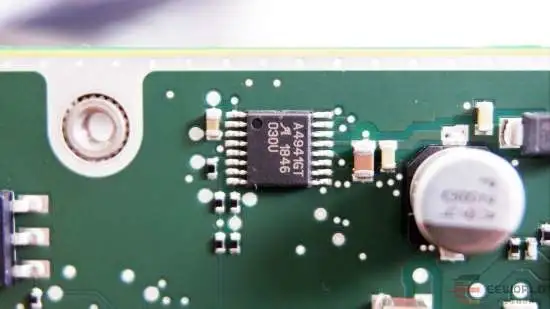
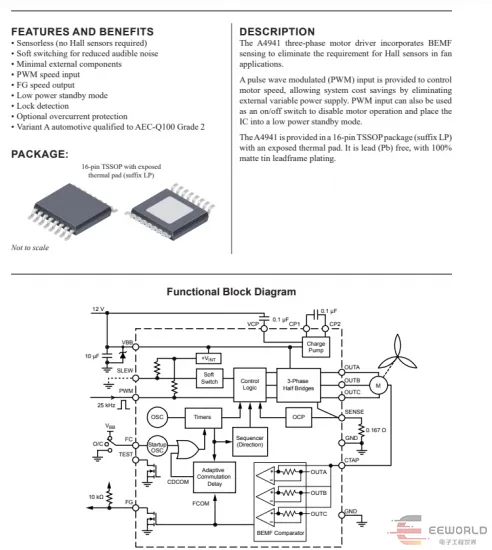
一颗AllegroMicro公司的A4941,三相无传感器风扇驱动器,如果这个电机驱动是不需要传感器的,那么之前接口上的8条线可能就不包括霍尔传感器的连线。
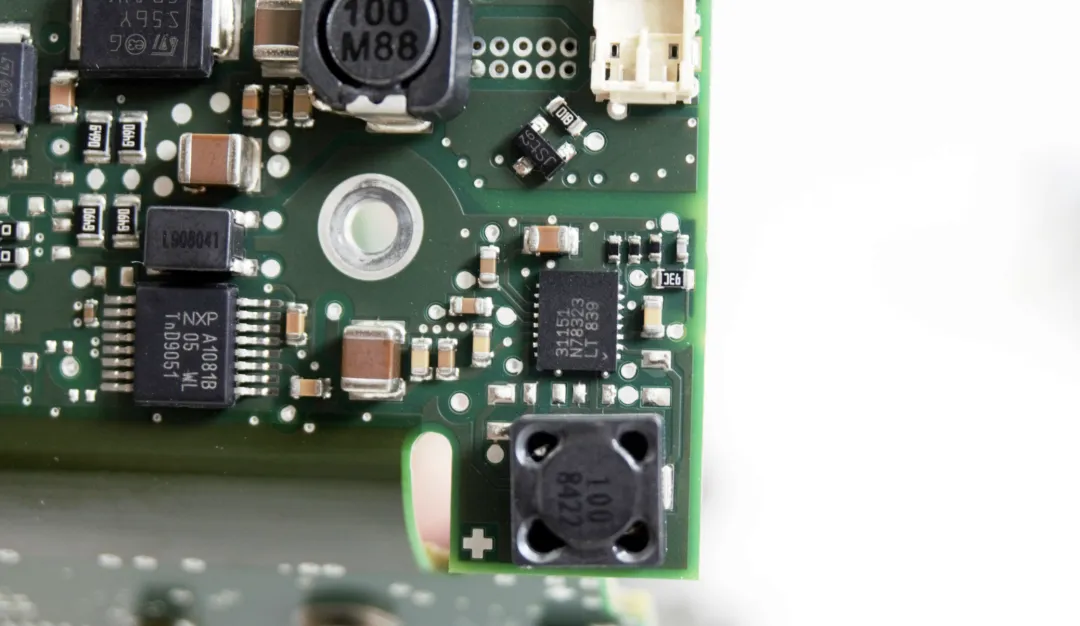
电源使用了Linear公司的LT3507,具有 LDO 的三重单片降压稳压器。
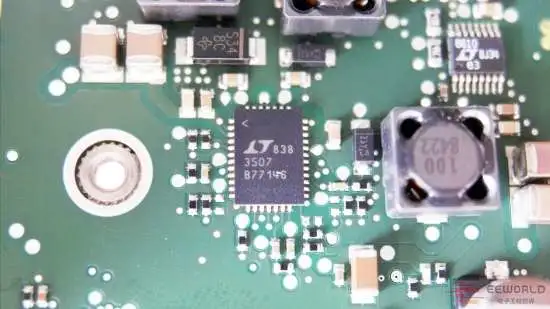

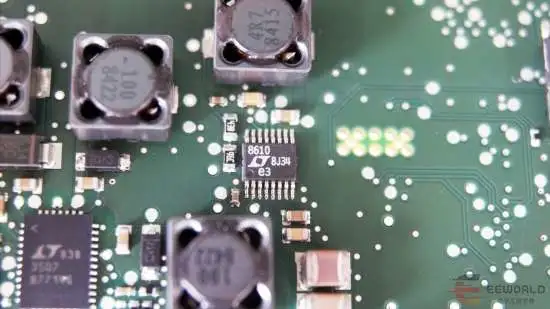
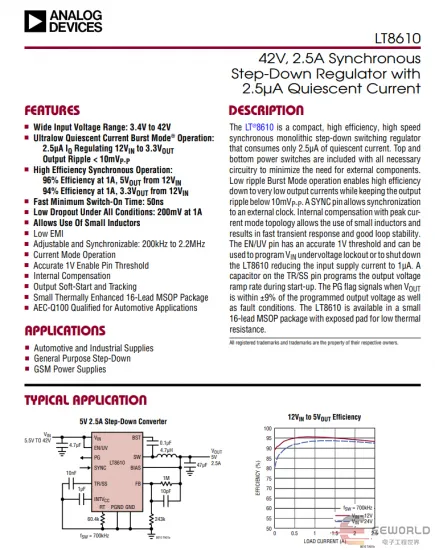
和Linear公司的LT8610,具有 2.5µA 静态电流的 42V、2.5A 同步降压稳压器。
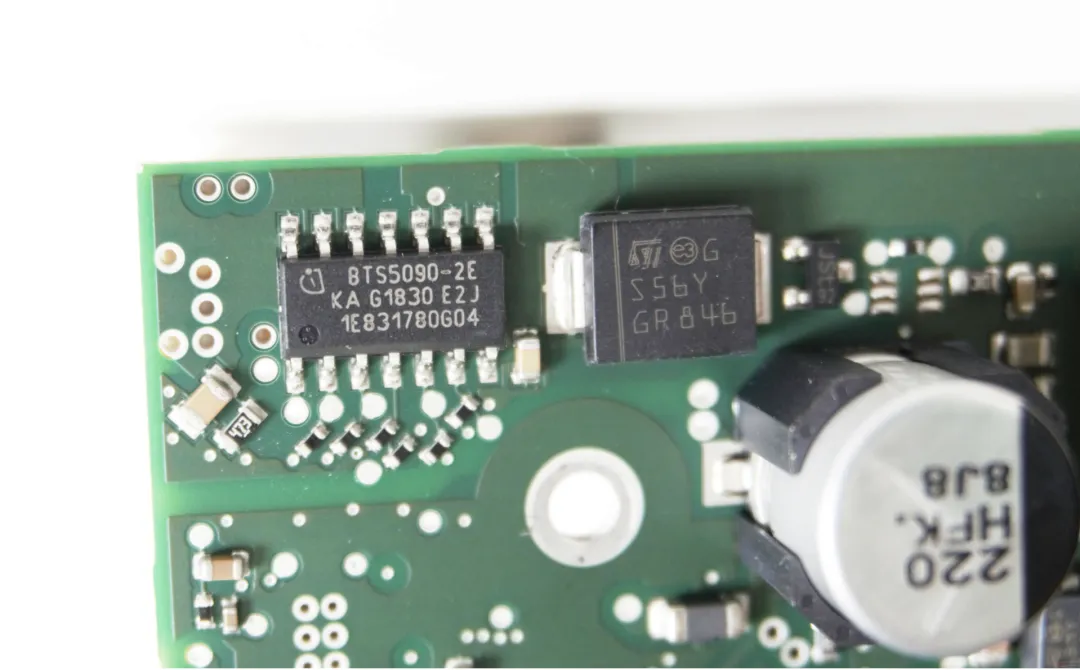
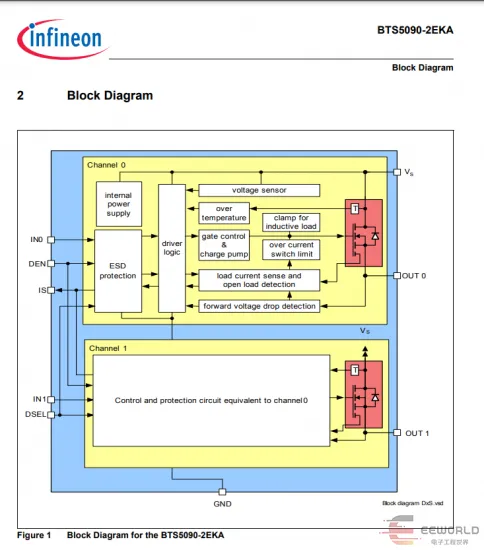
主板上还包含一颗英飞凌的BTS5090-2E,90mΩ双通道智能高侧电源开关。
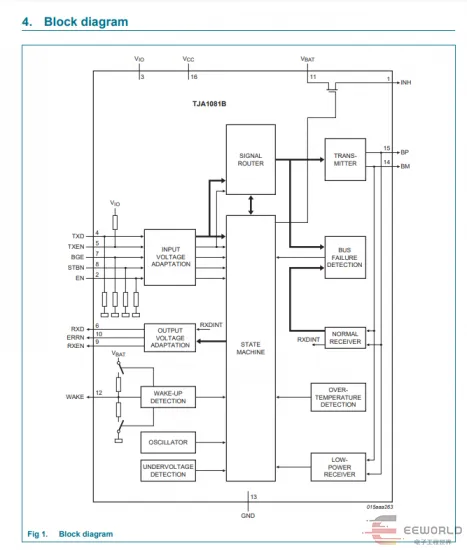
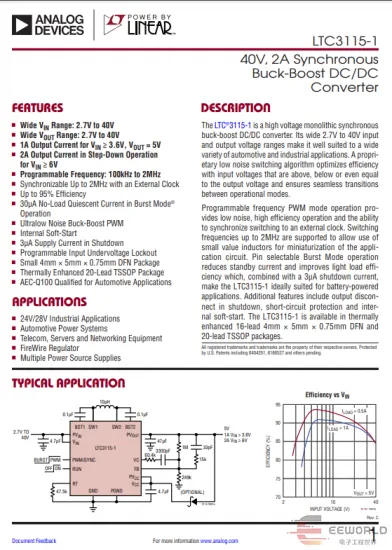
一颗NXP的TJA1081B,FlexRay 节点收发器和一颗Linear的LTC3115-1,40V, 2A Synchronous Buck-Boost DC/DC Converter。
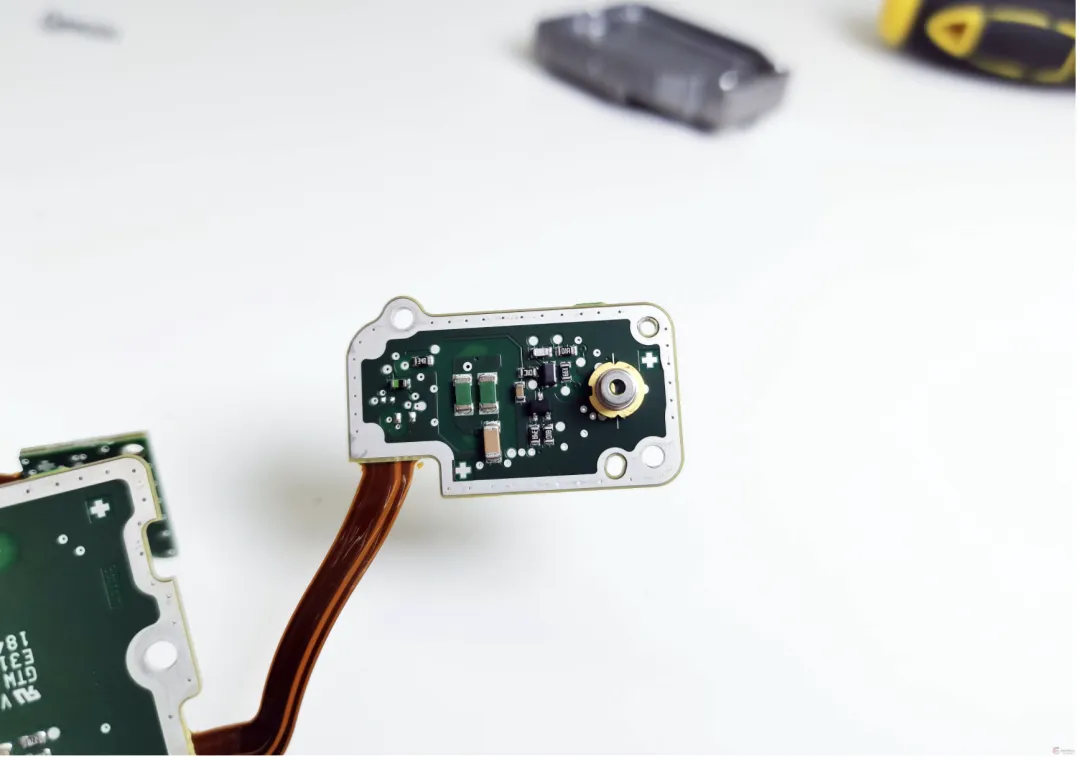
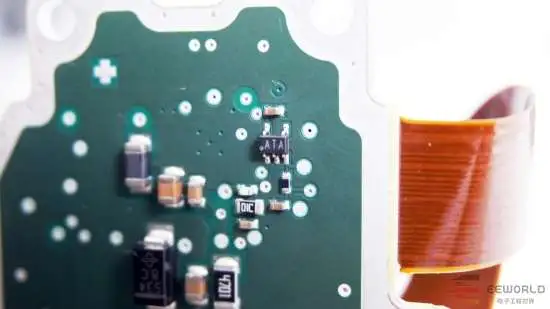
传感器部分同样由4块PCB组成一块主板,FPC是直接压在“硬板“中间的。
一块用于接收激光回波的APD板。通过布线可以看出这款APD有4路输出,结合这款激光雷达的产品手册判断它是一个4*1的阵列。

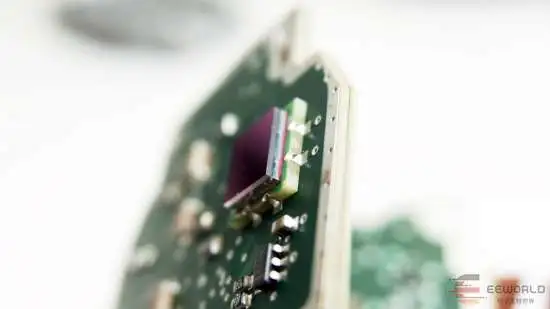
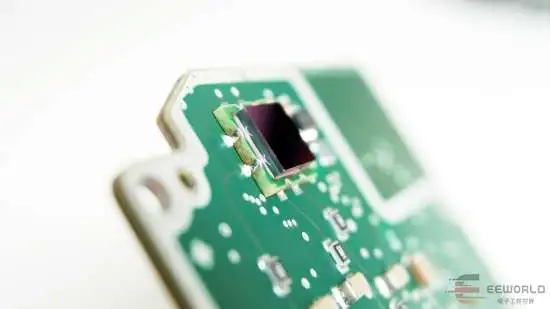
另一个小板上有一个905nm的激光器。

除了一块焊有和主板连接的连接器的小板外还有一块和电源相关的大板。

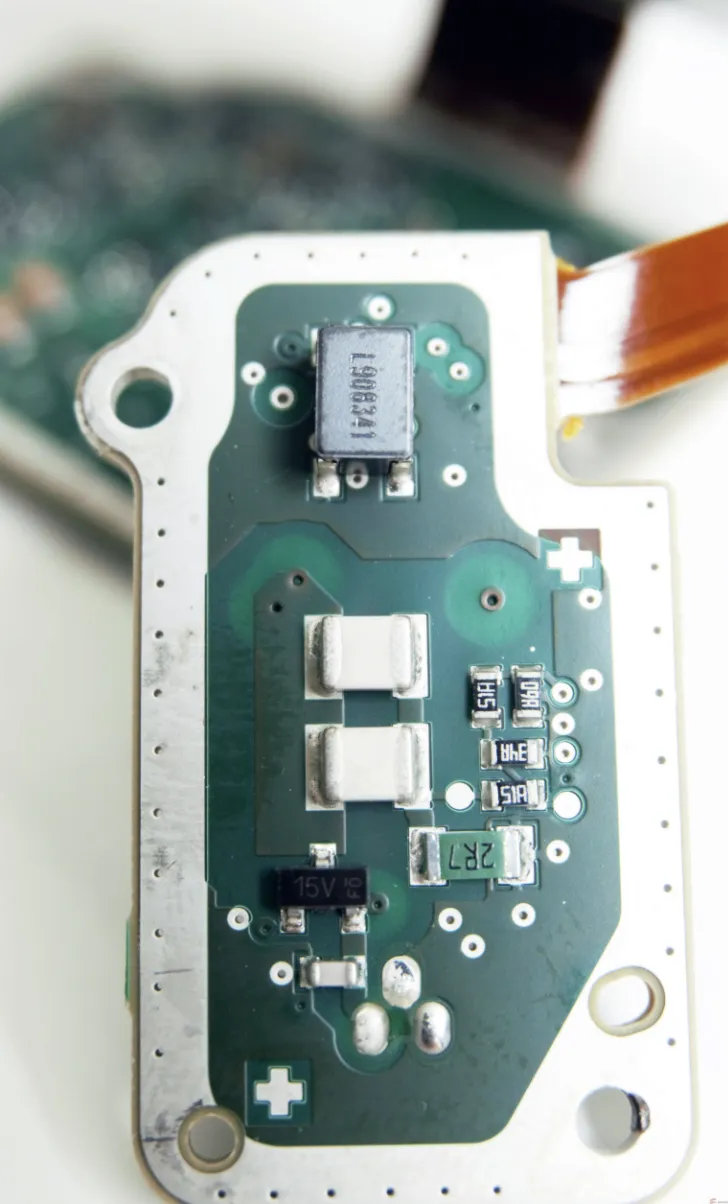
传感器电源板上有一颗丝印为LTDCJ的lt3580fg,一款Linear公司的2A升压/反相 DC/DC 转换器。


上边还有一个高高的像变压器一样的器件,没找到型号。
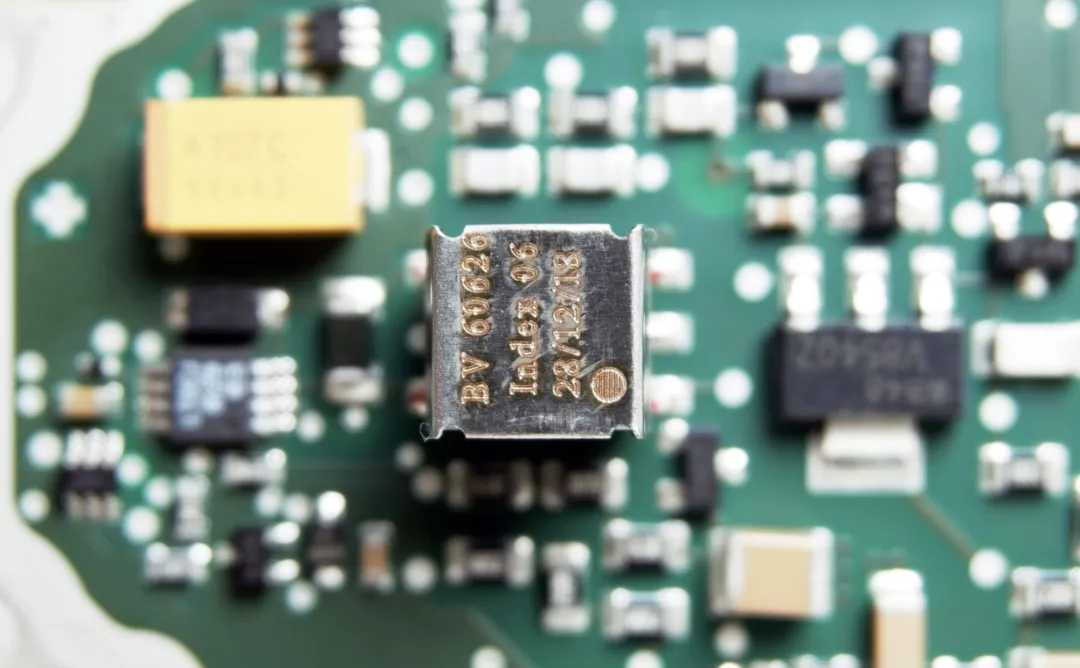
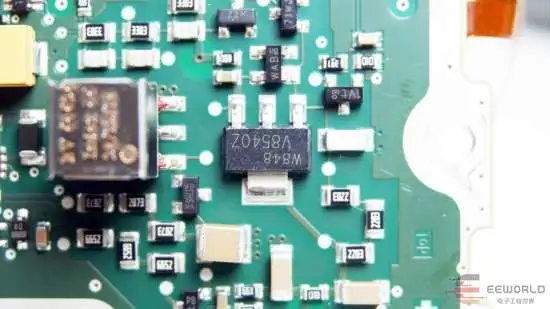
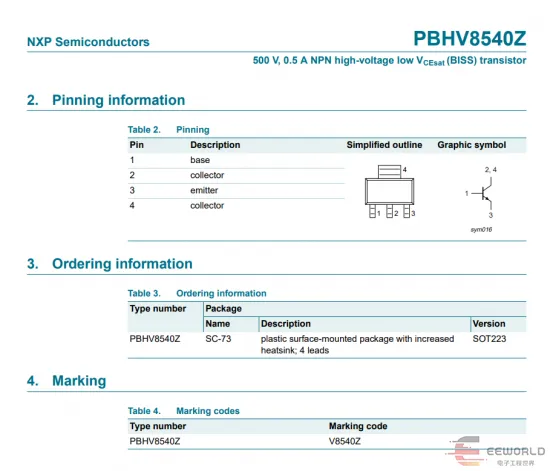
右边丝印为V8540Z的器件是NXP的PBHV8540Z,500 V、0.5 A NPN 高压低 VCEsat (BISS) 晶体管。
2颗丝印为ATA的LMV841QMGX/NOPB,TI公司的车规则级CMOS 输入、RRIO、低功耗、宽电源范围、4.5MHz 运算放大器。
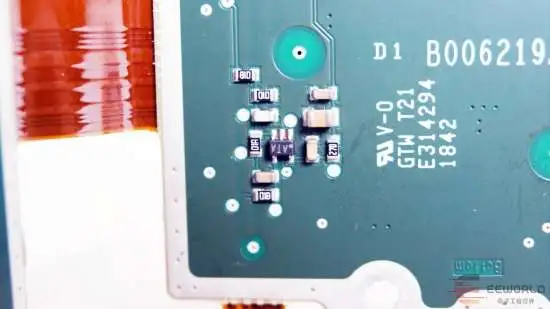
还有一些器件找不到型号。
更多汽车电子相关精彩内容,欢迎扫码关注订阅号:汽车开发圈

上一篇:英特尔发布全新车载独立显卡,塑造下一代AI座舱体验
下一篇:与高通硬刚,英特尔拿出了怎样的座舱产品?
推荐阅读最新更新时间:2026-03-18 18:02

 激光雷达技术与系统(英文)
激光雷达技术与系统(英文) 现代雷达系统的信号设计
现代雷达系统的信号设计- AZ7045RTR低压指示检测器典型应用电路
- LTM4608AMPY 3V 至 5.5Vin、2.5V/8A 输出 DC/DC 稳压器的典型应用电路
- 使用 L6562A 的恒流反向降压 LED 驱动器
- EP53A7HQI 1A同步降压稳压器典型应用电路
- OP284FSZ 缓冲网络补偿容性负载的典型应用
- EVAL-AD5116SDZ,用于仪表的 AD5116 数字电位器的评估板
- 用于音频的 4 通道 D 类音频功率放大器
- 使用 ON Semiconductor 的 ML4841 的参考设计
- LT3755IUD-1 降压模式 500mA LED 驱动器的典型应用电路,用于 20kHz PWM 调光
- RDR-669 - 使用 LinkSwitch-CV 的 5 W、85-265 VAC、恒压 (CV) 适配器

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号