swi(软中断)
我们知道arm有7中工作模式,除了usr模式,其他6种都是特权模式。我们知道usr模式无法修改CPSR直接进入其他特权模式,但linux应用程序一般运行在usr模式,既然usr模式权限非常低,是无法直接访问硬件寄存器的,那么它是如何访问硬件的呢?
linux应用程序是通过系统调用,从而进入内核态,运行驱动程序来访问的硬件,那么系统调用又是如何实现的呢,就是通过软中断swi指令来进入svc模式,进入到svc模式后当然就能访问硬件啦。
所以我们的应用程序在usr模式想访问硬件,必须切换模式,怎么切换?
有以下两种方式:
1.发生异常或中断(被动的)
2.swi + 某个值(主动的)
现在介绍如何进入软中断swi:
我们知道cpu一上电会跳到0地址(reset复位)执行代码,此时CPU处于svc模式,2440异常向量表如下图所示:
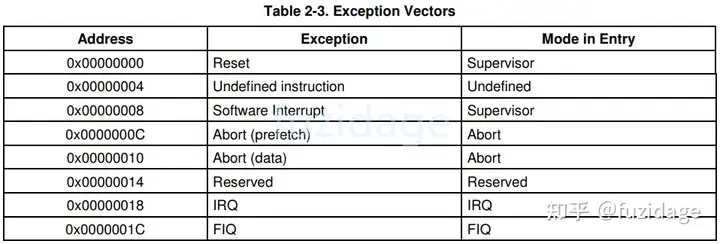
为了验证usr模式能够主动的通过swi软中断指令来进入svc模式, 我们先将模式切换到usr模式,那么这个时候就不能访问硬件了,也不能直接修改cpsr直接进入其他模式。
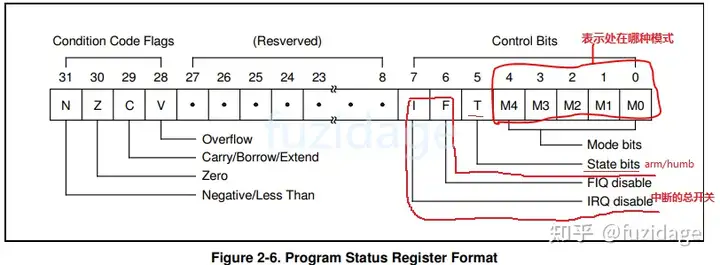
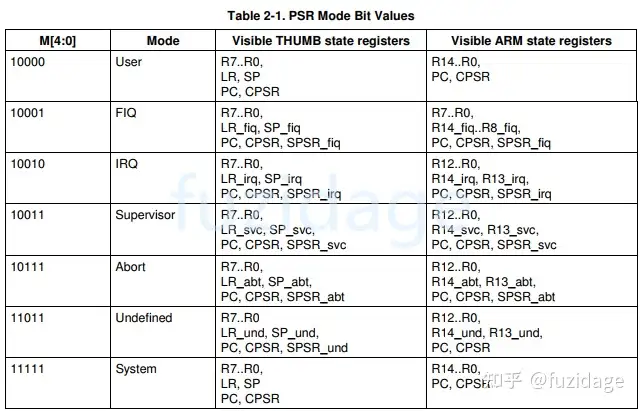
从上图我们设置CPSR让M4-M0处在10000,这样就进入了usr模式, 然后我们修改。修改start.s如下:
.global _start
_start:
b reset
ldr pc, und_addr
ldr pc, swi_addr
...
und_addr:
.word do_und
swi_addr:
.word do_swi
reset:
/*
set SP
sdram_init
重定位
bl uart0_init
*/
/*先进入usr模式*/
mrs r0, cpsr /* 读出cpsr 读到r0 */
/*使用bic命令 bitclean 把低4位清零*/
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
msr cpsr, r0 /* 写入cpsr */
/* 设置usr模式下的栈sp_usr */
ldr sp, =0x33f00000
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
那么当执行到swi 0x123,就会触发SWI异常, 进入0x8的向量去执行,调用do_swi,我们参考上一节do_und实现我们的软中断服务程序do_swi。
do_swi:
/* 执行到这里之前:
* 1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_svc保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 4. 跳到0x08的地方执行程序
*/
/* sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 保存现场 */
/* 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 处理swi异常 */
mrs r0, cpsr
ldr r1, =swi_string /*这里r0, r1只是为了给printException传参*/
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
swi_string:
.string 'swi exception'
完整的代码如下:
展开代码
.global _start
b reset
ldr pc, und_addr
ldr pc, swi_addr
...
und_addr:
.word do_und
swi_addr:
.word do_swi
do_swi:
/* 执行到这里之前:
* 1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_svc保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 4. 跳到0x08的地方执行程序
*/
/* sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 保存现场 */
/* 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 处理swi异常 */
mrs r0, cpsr
ldr r1, =swi_string /*这里r0, r1只是为了给printException传参*/
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
swi_string:
.string 'swi exception'
.align 4
reset:
/*
看门狗
时钟
set SP
sdram_init
重定位
bl uart0_init
*/
/*先进入usr模式*/
mrs r0, cpsr /* 读出cpsr 读到r0 */
/*使用bic命令 bitclean 把低4位清零*/
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
msr cpsr, r0 /* 写入cpsr */
/* 设置usr模式下的栈sp_usr */
ldr sp, =0x33f00000
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
测试结果如下:
打印出了软中断异常的字符串和svc模式。
如何打印出swi软中断号 如何才能知道swi的值呢?
我们要读出swi 0x123指令,我们知道当执行完swi 0x123指令以后,会发生swi异常,lr_svc = PC + offset. 从下图看出offset是4.
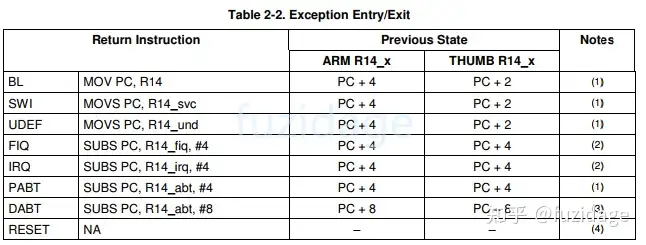
我们知道lr_svc保存着被中断模式的下一条指令的地址,那么我们把lr寄存器的地址减去4就是当前pc的值,即为swi 0x123这条指令的地址。
do_swi代码修改如下:
do_swi:
/* 执行到这里之前:
* 1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_svc保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 4. 跳到0x08的地方执行程序
*/
/* sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 保存现场 */
/* 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
我们要把lr拿出来保存,因为bl printException会破坏lr,那么把lr保存在哪个个寄存器比较好呢?
我们知道当调用‘bl printException’可能会修改某些寄存器,但是又会恢复这些寄存器,那么得知道它会保护哪些些寄存器。 我们来看下ATPCS规则:
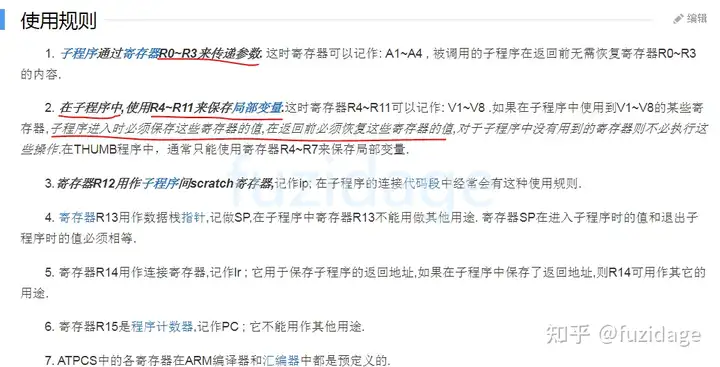
在子程序中,使用R4~R11来保存局部变量,子程序进入时必须保存这些寄存器的值,在返回前必须恢复这些寄存器的值。所以对于 r4 ~ r11在C函数里会保存这几个寄存器,执行完C函数再把它释放掉并且恢复原来的值。我们把lr 保存在r4寄存器里,r4寄存器不会被C语言破坏。
mov r4, lr
/* 处理swi异常 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
当执行完‘swi 0x123’指令后,会发生一次异常,那个异常模式里的lr寄存器会保存下一条指令的地址(即'ldr pc, =main'),我们把lr寄存器的地址减去4就是'swi 0x123'这条指令的地址。
把r4的寄存器赋给r0让后打印我们得写出打印函数
mov r0, r4
sub r0, r4, #4 //得到swi指令的地址
bl printSWIVal
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
swi_string:
.string 'swi exception'
在uart.c添加printSWIVal打印函数:
void printSWIVal(unsigned int *pSWI)
{
puts('SWI val = ');
printHEx(*pSWI & ~0xff000000); //高8位忽略掉
puts('nr');
}
上一篇:s3c2440裸机-异常中断4-irq外部中断
下一篇:s3c2440裸机-异常中断2-und未定义指令异常
推荐阅读最新更新时间:2026-03-13 20:23

 实时操作系统μC/OS-II在LPC2210上的移植
实时操作系统μC/OS-II在LPC2210上的移植 ARM指令集(2)
ARM指令集(2) 现代雷达系统的信号设计
现代雷达系统的信号设计
- BGA3015 - 5 至 300MHz、15dB 反向放大器应用
- led-panel:白光LED的LED面板分线板
- EVAL6480H,L6480 大功率步进电机驱动器演示板
- KIT33816FRDMEVM,MC33816 Freedom Board KL25Z 评估套件,喷油器
- STA333BW,用于数字音频功率放大器电视和便携式应用的评估板
- 使用 Analog Devices 的 LTC1439CG 的参考设计
- 使用 2 速时钟的 7.5us 模数转换器
- LDK130C33R 3.3V、300 mA 低静态电流、极低噪声 LDO 的典型应用固定版本电路
- LX7172、1.4MHz、1.2A 同步降压转换器的典型应用
- MIC2755 的典型应用:电池系统监控器

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号