直流电动机具有启动转矩大、控制性能优等特点。目前直流电机多采用传统的PID控制,PID控制是最早发展起来的控制策略之一。由于其具有算法简单、鲁棒性好和可靠性高等优点,被广泛应用于工业过程控制中。但PID控制适合于可建立精确数学模型的确定性控制系统。
但实际的工业过程控制系统中存在很多非线性或时变的不确定因素,使得PID控制器的参数整定过程繁琐。控制效果也因此而受影响。近些年来。随着现代控制理论、智能控制和计算机技术的飞速发展。出现了很多新型的控制系统。模糊控制就是其中之一。本期带来基于模糊PID的直流电机Simulink模型的搭建。
1、模糊控制
模糊控制作为目前最具实际意义的智能控制方法之一,以模糊集合论、模糊语言变量及模糊逻辑推理为基础。实现一步模糊控制算法的过程:获取被控制量的精确值。将此量与给定值比较得到误差信号,一般选误差信号作为模糊控制器的一个输入量。把误差信号的精确量进行模糊化变成模糊量。误差的模糊量可用相应的模糊语言表示,得到误差的模糊语言集合的一个子集(一个模糊矢量),再由误差和模糊控制规则(模糊算子)根据推理的合成规则进行模糊决策,得到模糊控制量。
2、基于模糊控制的转速调节器设计
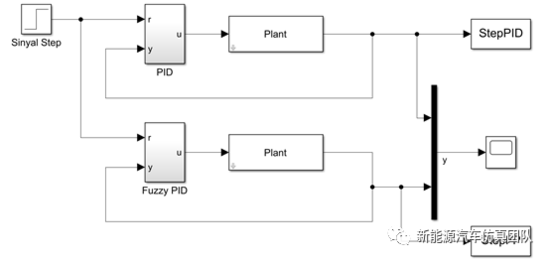
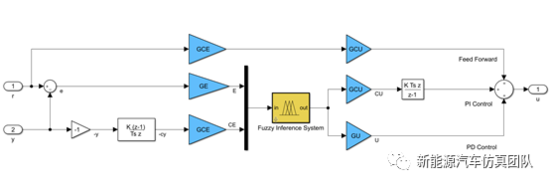
直流电机控制系统中,外环转速调节器采用模糊PID控制器.内环电流调节器依然采用传统PID控制器。从理论上讲.模糊控制器的维数越高。控制越精密。但是维数越高。模糊控制规则变得过于复杂,控制算法的实现相当困难。这是目前广泛应用二维模糊控制器的原因所在。
模糊控制输出量确定的过程:
①确定输入与输出变量的模糊子集和论域及其隶属度:
②设计模糊推理关系,确定模糊控制规则,以明确模糊关系矩阵:
③模糊决策,确定输出量在其论域上的模糊矢量:
④模糊判决,即将控制量去模糊化,得到确定的输出变量。进而得到相应的控制表。
代码:
clc;clear;close all;
% 传递函数
Ts = 0.01;
J = 0.01;
b = 0.1;
Ke = 0.01;
Kt = 0.01;
R = 1;
L = 0.5;
syms s;
K = Ke;
num = K;
den = sym2poly((J*s+b)*(L*s+R)+K^2);
sys = tf(num,den);
Plant = c2d(sys,Ts,'zoh');
figure
step(Plant)
title('初始系统响应')
open_system('SimFuzzyPID')
open_system('SimFuzzyPID/Fuzzy PID')
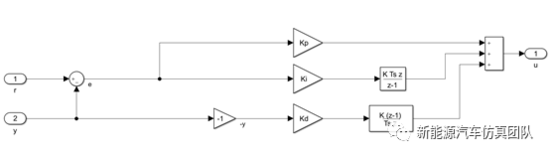
% 设计传统的 PID 控制
open_system('SimFuzzyPID/PID')
C0 = pid(1,1,1,'Ts',Ts,'IF','B','DF','B'); % PID结构
C = pidtune(Plant,C0) % 设计PID
[Kp, Ki, Kd] = piddata(C); % 参数PID
GE = 100;
GCE = GE*(Kp-sqrt(Kp^2-4*Ki*Kd))/2/Ki; % Kp = GCU * GCE + GU * GE
GCU = Ki/GE; % Ki = GCU * GE
GU = Kd/GCE; % Kd = GU * GCE
% 模糊推理系统 Sugeno:
FIS = newfis('FIS','FISType','sugeno');
FIS = addvar(FIS,'input','E',[-100 100]);
FIS = addmf(FIS,'input',1,'Negative','gaussmf',[70 -100]);
FIS = addmf(FIS,'input',1,'Positive','gaussmf',[70 100]);
FIS = addvar(FIS,'input','CE',[-100 100]);
FIS = addmf(FIS,'input',2,'Negative','gaussmf',[70 -100]);
FIS = addmf(FIS,'input',2,'Positive','gaussmf',[70 100]);
FIS = addvar(FIS,'output','u',[-200 200]);
FIS = addmf(FIS,'output',1,'Min','constant',-200);
FIS = addmf(FIS,'output',1,'Zero','constant',0);
FIS = addmf(FIS,'output',1,'Max','constant',200);
% 模糊规则
ruleList = [1 1 1 1 1;...
1 2 2 1 1;...
2 1 2 1 1;...
2 2 3 1 1];
FIS = addrule(FIS,ruleList);
sim('SimFuzzyPID')
load('StepPID')
load('StepFP')
figure
plot(StepPID(1,1:401),StepPID(2,101:501))
hold on
plot(StepFP(1,1:401),StepFP(2,101:501))
hold off
title('控制后的系统响应')
legend('PID','Fuzzy-PID')
3、系统仿真与分析
为分析模糊控制器控制性能.针对直流电机控制系统.利用模糊控制技术设计转速调节器.电流调节器依然采用传统PI控制.用Matlab/Simulink仿真工具进行了系统仿真。并和传统内外环均采用PID控制的系统指标进行了比较。
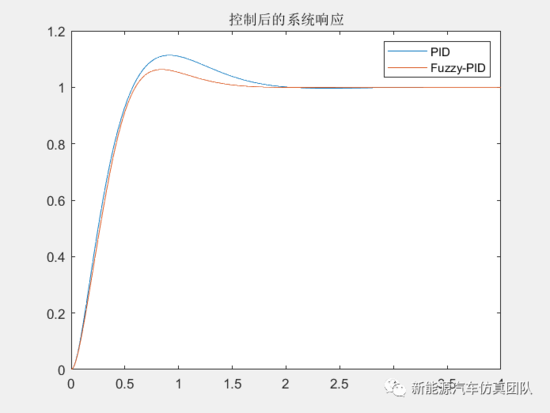
从仿真结果可以看出。模糊PID控制系统具有超调量小、鲁棒性和抗负载扰动能力强的优点。由于模糊PID的设计比较简单,容易实现,控制效果也更出色。
上一篇:两相感应伺服电动机的控制方法
下一篇:三菱PLC MELSEC L系列基本操作步骤
推荐阅读最新更新时间:2026-03-12 18:02

 基于开发板frdmmcxn947利用lwip_httpsrv_freertos程序开发
基于开发板frdmmcxn947利用lwip_httpsrv_freertos程序开发 dToF(直接飞行时间)算法模型SimuLink仿真
dToF(直接飞行时间)算法模型SimuLink仿真 实用电子元器件与电路基础
实用电子元器件与电路基础 现代雷达系统的信号设计
现代雷达系统的信号设计- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- VPU中的“六边形战士”:安谋科技Arm China发布“玲珑”V560/V760 VPU IP
- 利用锚定可信平台模块(TPM)的FPGA构建人形机器人安全


 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号