电动汽车各个模块之间的交互有效性直接影响了汽车的行驶效率和驾驶感。而插电式混合动力汽车根据电力驱动系统和发动机动力系统的布局形式可以分为3类:串联式、并联式、串-并联混合式。该文探讨的是并联式混合动力系统方案,它具有对原车技术模块化,实施性方便,适用性广特点。
2 术 语
总线电压:总线电压是CAN总线的CAN_H或者CAN_L 对各自CAN节点地的电压。
而针对插电式混合动力汽车的控制系统,需要对其整车控制模块(HCU)和动力系统、安全系统进行详细的分层及规划。
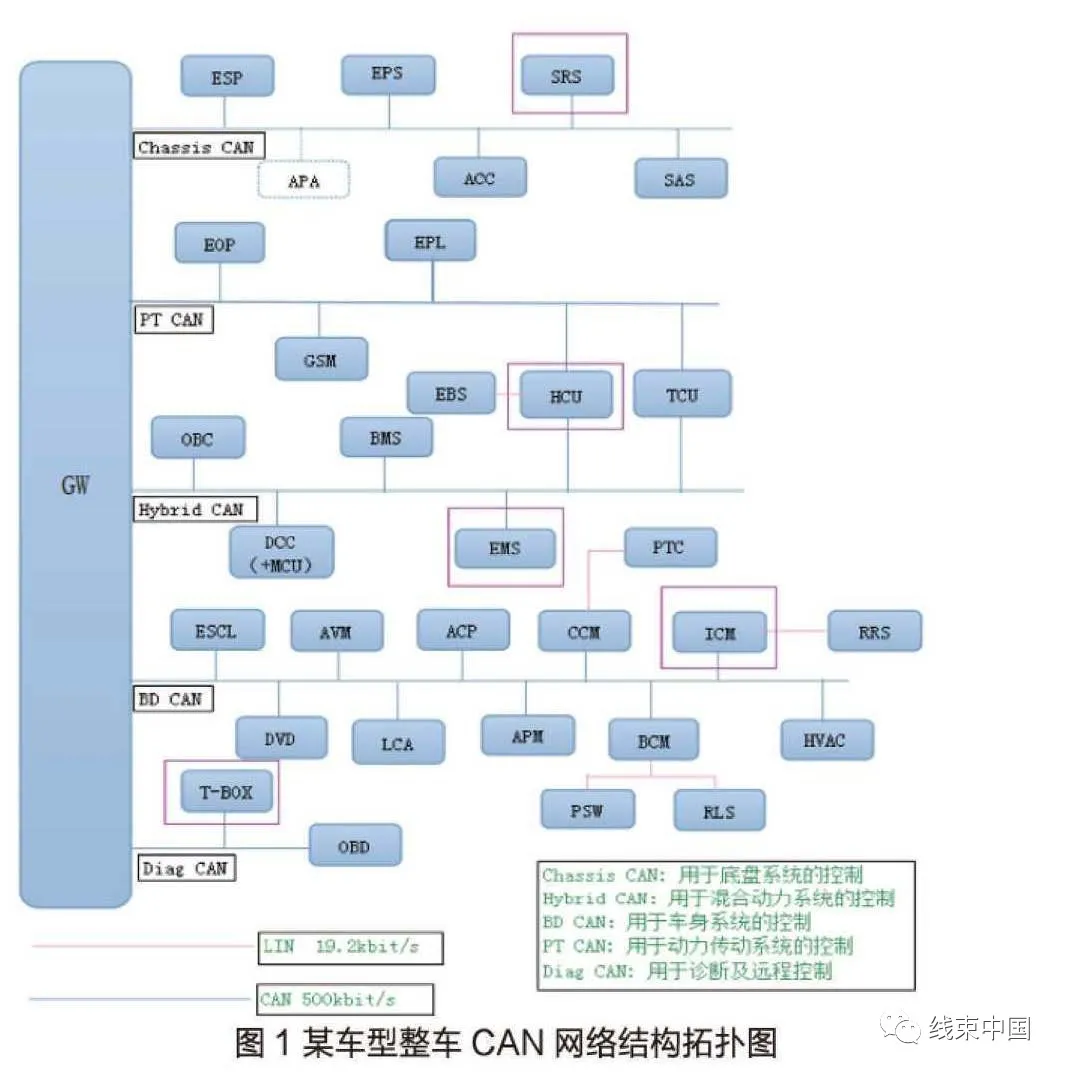
一般情况下,通讯网络的拓扑结构种类多,支线复杂繁琐,而总线往往检测矫正能力较强,实施信号好,可靠性有保证,能够有效地判断错误节点和自动校正简单错误,所以将通信网络设计成总线型CAN网络结构可以满足信息传递及时性和可靠性的要求。根据系统分层控制的原理,设计并联式混合动力CAN通讯结构拓扑图,如图1 所示。
对于CAN线束设计,一般要求如下几点:
1) CAN总线总长度<40m;
2) ECU间距<20m;
3) ECU节点数量<20个;
4) 线束使用屏蔽线(高速CAN)或者双绞线(低速CAN);
5) 线束要求支线必须尽可能短;诊断节点直接与总线相连,端口长度应该尽可能短,要求最长为lm。从连接器中诊断仪之间的连线也应该尽可能短,最长不超过5m。
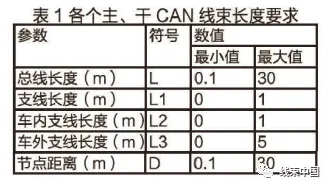
6) CAN 线在布局线束时尽量保持走线顺畅,避免出现CAN线回折现象。确保每条支线与主干线相接时,CAN_H 和CAN_L的连接点尽量保持在主干线的同一位置上。原则上各节点之间的节点距离D 不允许等长度, 应尽量远离电源线和信号线, 且尽量避免平行走线;7) 不要在干扰源附近布置CAN总线,如果无法避免,应使用屏蔽线。当使用屏蔽线时,屏蔽层必须在任一端接地( 或两端屏蔽层接地)。整车线束中CAN线各个主干、支线长度的要求,如下表1:
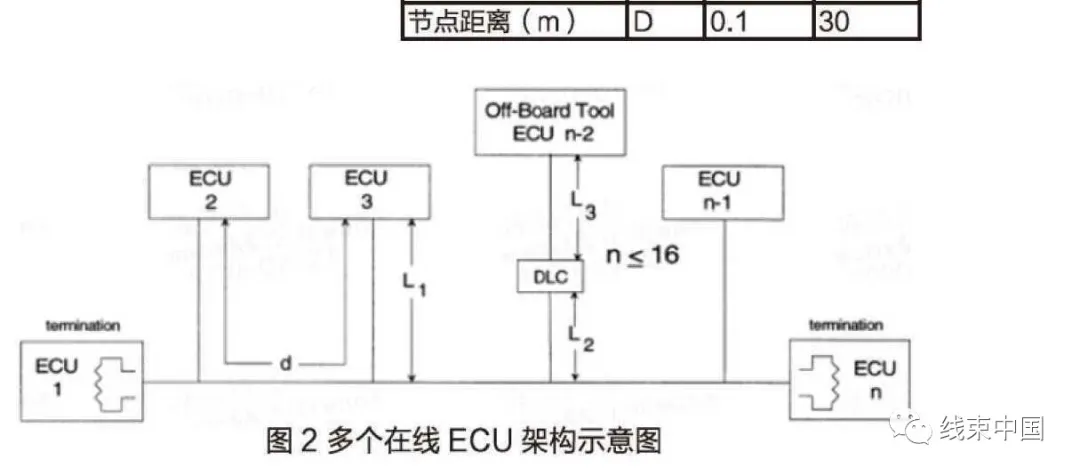
为了避免电缆电源信号的干扰,CAN网络的节点应尽量靠近干线。实际应用中应该尽可能使用短支线与总线连接,为了减少驻波,CAN网络里的ECU不应该放置相等的距离并且电缆尾部不应全为相同德长度引线。
4.2 终端电阻
终端电阻可临近放置于或放置于距离最长的而两个在线ECU内。非终端ECU可选连接。根据标准要求,给CA N 总线上提供的终端电阻是60Ω,故整车CAN总线上最远的两个节点必须各有一个120Ω终端电阻(要求在CAN_H和CAN_L之间)。
终端电阻的大小分为要求为:110Ω-130Ω。典型值为:120Ω。
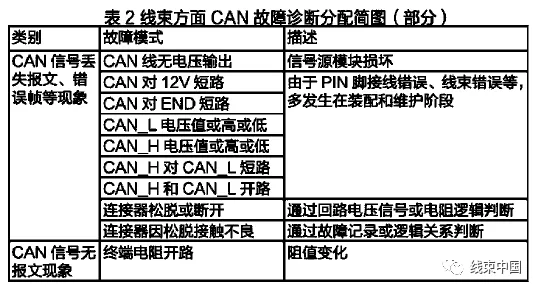
5 CAN线故障常见容错性能
6 结束语
综上所述,根据插电式混合动力汽车的整车系统特点和功能要求,设计了混合动力汽车的整车CAN通讯系统,并以此为基础确定了其网络结构布局,依据通讯节点类型,设计了汽车有效地网络拓扑结构图,有效地满足汽车对于网络系统的设计要求,对插电式混合动力汽车的进一步发展具有十分重要的意义。
上一篇:48V 电气架构下的汽车连接器
下一篇:推进ECU板对板连接,提升自动驾驶水平
- 热门资源推荐
- 热门放大器推荐
 现代雷达系统的信号设计
现代雷达系统的信号设计 TLC27M7IPP3
TLC27M7IPP3
- LT1585CM-3.3 3.3V/4.6A 低压差稳压器的典型应用
- 扩展 5V 供电 RS232 收发器的应用
- 使用 TB62757FUG 升压 DC-DC 转换器用于 4 个白光 LED 驱动器的典型应用
- LTC2992CMS-1 功率效率计的典型应用
- CLRC663非接触式读写器IC的典型应用
- DER-581 - 带有无损零交叉电路的45W反激式转换器
- THEVA1023B、THC63LVD1023B LVDS 双链路传输视频数据评估套件
- OP249GSZ-REEL7瞬态输出阻抗测试治具典型应用电路
- LTC1771 3.2V/2A 稳压器
- LTM4628IY 双路 8A、1.5V 和 1.2V 输出 DC/DC 模块稳压器的典型应用电路

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号