
近日,孙立宁教授、苏州大学刘会聪教授与新加坡国立大学Chengkuo Lee教授在SmartBot期刊上发表了题为MEMS: The Sensory Nervous System for Embodied AI Robots的综述文章,系统梳理了MEMS技术在具身智能机器人中应用的现状与挑战。
具身智能(Embodied AI)的兴起标志着人工智能(AI)研究的一次根本性转变,即从虚拟世界走向真实物理环境,旨在构建能够在复杂、非结构化环境中实现感知、推理与行动的自主机器人系统。然而,传统传感器受限于体积和功耗,难以满足机器人对自身状态与外部环境的全面感知需求。微机电系统(MEMS)技术凭借微型化、低功耗、高集成度和低成本等优势,已成为提升新一代机器人感知能力的关键支撑。本文系统梳理了面向具身智能机器人的MEMS传感技术最新进展。通过集成测距、惯性、触觉、听觉和嗅觉等多模态MEMS传感器,机器人能够实现更为丰富的环境感知与交互,为不同应用场景下的高自主性、安全性和人机协作奠定坚实基础。可以说,MEMS传感器如同机器人的“感知神经元”,与人工智能构成的“认知大脑”深度融合,共同推动真正具备感知与智能的机器人新时代的到来。
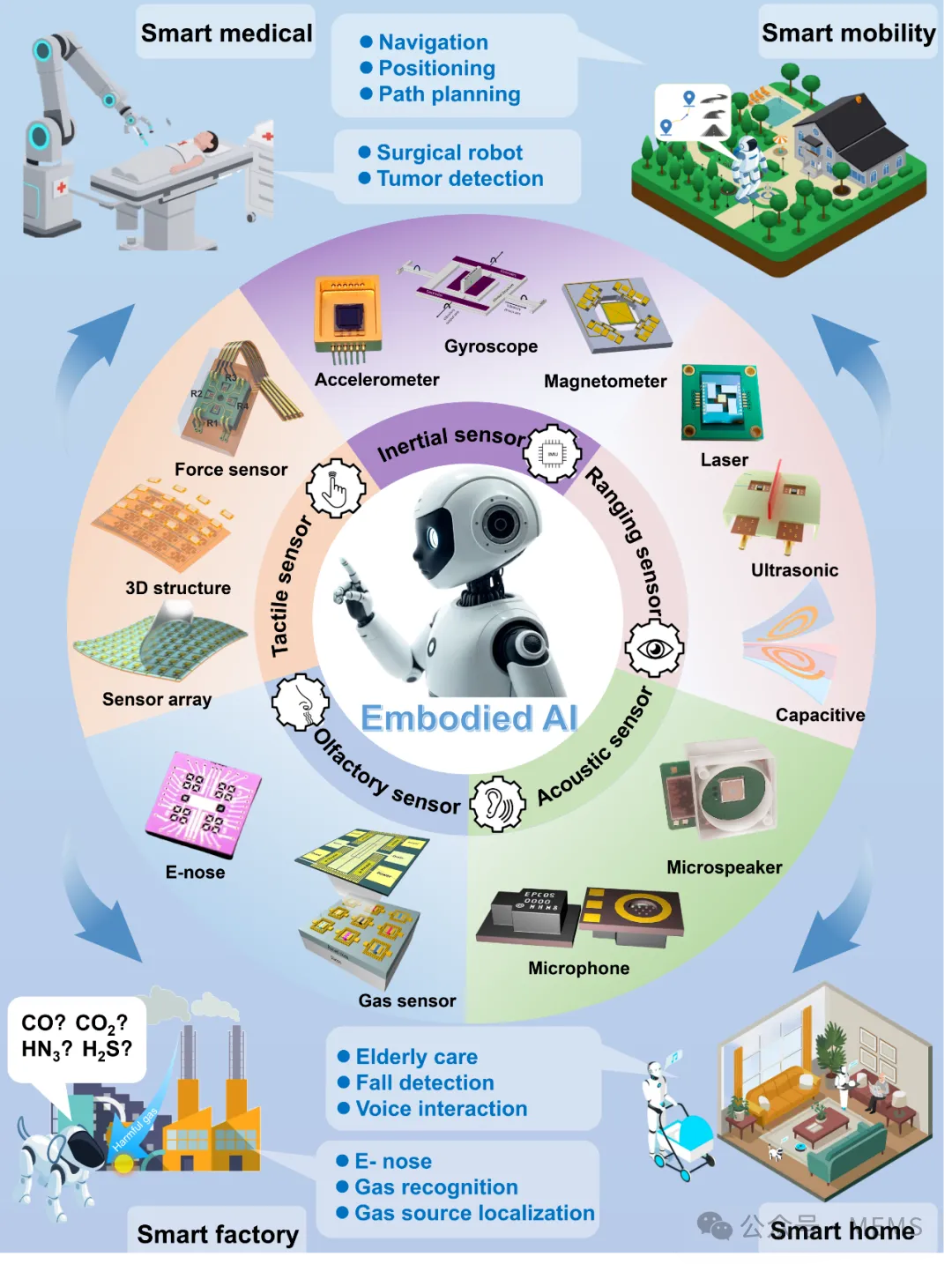
图1 MEMS传感器在具身智能机器人中的应用
图文摘要
精准的环境感知是机器人实现自主导航、物体操控以及安全人机交互等核心功能的前提与基础。其中,测距传感器通过探测周围物体的距离,为环境建模与理解提供关键数据。MEMS技术的引入,为测距传感器带来了微型化、低功耗和低成本等革命性优势,极大促进了高性能机器人的普及与发展。MEMS测距传感器通常通过检测机械结构的微小形变与振动模态变化,或分析发射波的传播特性来实现高精度距离感知。目前,以激光、超声波和电容测距为代表的多种MEMS技术,已共同构成机器人多场景环境感知的重要支撑,成为推动新一代机器人智能水平提升的关键技术。

图2 MEMS测距传感器分类及应用
MEMS惯性传感器通常由加速度计、陀螺仪和磁力计三种主要部件组成。通过测量物体的加速度、角速度及磁场等物理量, 提供精确的运动和定位数据。惯性测量单元 (Inertial Measurement Unit, IMU)集成了加速度计、陀螺仪和磁力计, 融合多维数据精确估算机器人的位置、速度、姿态和角度。IMU是机器人导航系统中的核心传感器, 尤其是在无法使用GPS的环境下, IMU可以提供连续的运动估计, 确保机器人平稳、精准的运动, 在检测控制、环境感知和导航定位方面具有重要作用。MEMS惯性传感器在机器人领域的应用极为广泛, 涵盖了导航定位、姿态控制、精密操作等多个重要场景。

图3 IMU在机器人中的多场景应用
在复杂的非结构化环境中,机器人需借助触觉感知实现精准、安全的物理交互。MEMS触觉传感器正如机器人的“电子皮肤”,不仅可检测接触力的大小与方向,更能感知压力分布、识别纹理、判断滑动状态甚至温度变化,极大丰富了机器人的物理交互能力。基于压阻、电容、压电与摩擦电等效应,MEMS技术将微机械结构对外界刺激的响应转化为电信号,实现高灵敏度、高空间分辨率的触觉感知。这类传感器为机器人抓取操控、精细操作和人机协作等任务提供了关键支持。
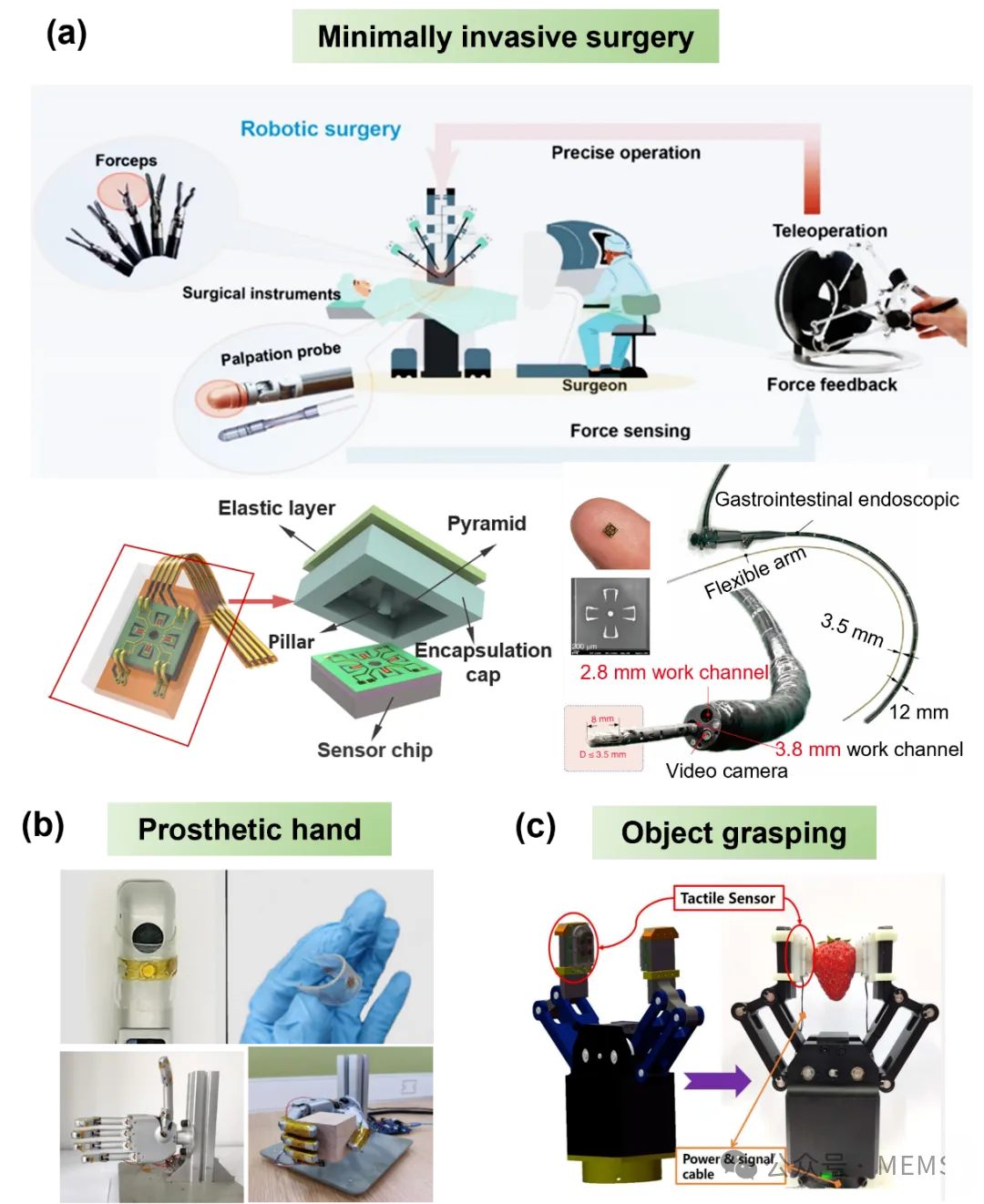
图4 MEMS触觉传感器应用于手术机器人及灵巧手感知
柔性触觉传感器基于柔软且可拉伸的材料制成,能够紧密贴合复杂曲面,为机器人提供大范围、多模态的触觉感知能力。其核心原理是将压力、拉伸等机械信号转换为电阻、电容等电学变化,模拟人体皮肤的力学感知机制。与传统MEMS触觉传感器形成互补:MEMS传感器擅长局部高精度测量,而柔性传感器则可构建“电子皮肤”(e-skin),实现分布式触觉感知与更安全的人机交互。这类传感器不仅能够检测压力与形变,还可感知温度、湿度等多种物理量,广泛应用于机器人灵巧操作、可穿戴设备、健康监测及人机交互等领域,是提升下一代机器人环境适应性与交互智能的关键技术。

图5 柔性触觉传感器应用于机器人多变量感知
听觉感知显著增强了机器人与环境交互的能力,是实现具身智能机器人高级功能的关键。MEMS声学传感器,包括麦克风与扬声器,以其芯片级尺寸、高保真性能和低失真特性,为机器人提供了“听”与“说”的双向语音能力。MEMS麦克风可准确捕捉人声与环境声音,实现语音指令接收、声源定位及工业设备状态监测。而MEMS扬声器则能够输出高声压、宽频带的音频,为机器人提供清晰、沉浸式的语音反馈。两者协同工作,构建了高自然度的人机语音交互基础,从而大力推动了机器人在服务、救援、工业检测等场景中的环境感知与人性化交互水平。

图6 MEMS声学传感器
嗅觉感知为机器人提供了超越人类能力的化学环境理解手段,是实现新一代智能机器人的关键感知维度。MEMS嗅觉传感器作为“电子鼻”的核心,能够识别气体种类、检测浓度变化并实时追踪气味源,极大扩展了机器人在环境监测、灾害响应与工业安全等领域的应用潜力。通过感知挥发性有机物(VOCs)甚至危险化学品,机器人可执行化学品泄漏预警、爆炸物探测乃至疾病初步筛查等高风险任务,有效替代或辅助人类完成复杂和危险场景下的作业。

图7 MEMS嗅觉传感器
总结与展望
MEMS传感器之所以成为具身智能机器人的核心基石,源于其独特优势与机器人复杂感知需求的高度契合。MEMS工艺能够在毫米甚至微米尺度上集成复杂机电结构,在极小空间内实现高精度感知,显著推动了机器人系统的微型化与高性能化。无论是在机器人关节、指尖等受限空间中的嵌入式集成,还是在整个机体内部署大规模分布式传感网络,MEMS技术都提供了传统传感器难以比拟的解决方案。这种能力不仅保障了机器人运动自由度和外观整体性,更为实现真正意义上的“具身感知”奠定了硬件基础,即通过多维度、多模态的环境状态数据,为AI模型提供实时、丰富且可靠的物理交互信息。
尽管MEMS技术极大推动了机器人感知与驱动能力的发展,其在构建高水平自主具身智能系统方面仍面临制造与集成两大核心挑战。在制造层面,不同类型MEMS传感器依赖差异化工艺体系,导致难以建立统一的标准化生产平台,限制了多类传感器的大规模、低成本生产,从而制约了多功能集成机器人的推广应用。在集成层面,机械集成问题尤为突出:如何在机器人关节、末端等狭小空间内实现高精度、抗应力、抗振动及热变形的稳定安装,同时优化多传感器布局、简化布线并抑制机器人与传感器之间的动态耦合干扰,是提升系统整体性能与可靠性的关键难题。

图8 面向具身智能机器人的MEMS传感器展望
展望未来,MEMS传感技术将推动机器人感知迈向软硬件深度协同的革命性阶段。其发展重点不再局限于单一传感器性能的提升,而在于构建“感知-认知”一体化的智能系统。在硬件层面,MEMS与存算一体技术的结合将实现感知方式的根本变革。在应用层面,多模态MEMS传感系统将为大型语言模型和多模态模型提供物理世界的真实、连续和多维数据基础,弥补其与现实环境之间的差异。可以说,具身智能的未来建立在MEMS与人工智能的深度协同之上。MEMS提供语义化的“感知神经元”,大型模型构成“认知大脑”。这种融合将引领机器人突破既定程序的限制,进入真正感知、理解并与人类共同适应物理世界的新时代。
上一篇:机器人“iPhone时刻”!深度分析人形机器人上、中、下游产业链,或成5-10年最大机会!
下一篇:ABB与软银签约拟出售机器人业务
- 热门资源推荐
- 热门放大器推荐
 非常经典的关于LLC的杨波博士论文
非常经典的关于LLC的杨波博士论文 LTC6102HVHMS8
LTC6102HVHMS8
- ADR435B 5 Vout 超低噪声 XFET 电压基准的典型应用,具有灌电流和拉电流能力
- 使用 Analog Devices 的 ADP8140 的参考设计
- NCP699SN30T1G 150mA、3 路输出电压 CMOS 低 Iq LDO 的典型应用,在 TSOP-5 中启用
- ZTL431过压/欠压保护电路典型应用
- 使用 Microchip Technology 的 DVR2802B3 的参考设计
- 开源的浮游生物监测分析设备PlanktoScope
- STK503,旨在评估 AT90USB AVR MCU 的入门套件,通过 AVR Studio 支持 JTAGICE mkII 和 AVRISP mkII
- 使用 BittWare 的 XCVU190 的参考设计
- 远程声控参考设计
- NCP4354AADAPGEVB,用于 NCP4354、65W 适配器关闭模式控制器的评估板

 NACP4.7M25V6.3x5.5TR13F
NACP4.7M25V6.3x5.5TR13F






 京公网安备 11010802033920号
京公网安备 11010802033920号