根据Omdia测算,2024-2030年全球人形机器人出货量的年复合增长率将达到84%,从而带动上游视觉传感器需求快速放量。以特斯拉为例,初代Optimus装配了8颗摄像头,覆盖头部、肩部、腰部三个高度。二代的Optimus Gen-2则保留了三个摄像头在头部,依托自研 Dojo D1 芯片进行图像识别训练。国内厂商优必选的WALKER X人形机器人采用胸部四目系统及头部加腰部双RGBD传感器,以实现出色的物体和场景识别。视觉传感器作为核心感知模块在人形机器人的设计中占据重要的地位。
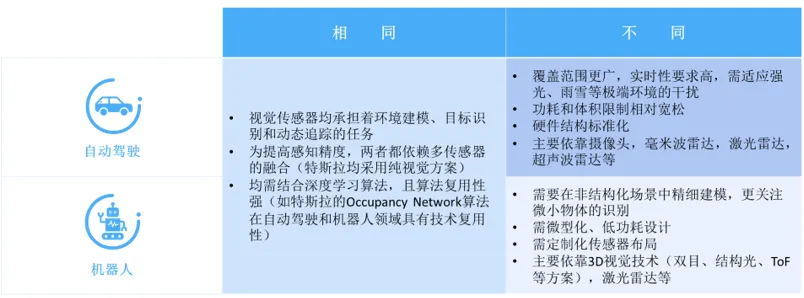
3D视觉技术在机器人视觉感知中占据主导地位。双目视觉、结构光和飞行时间(ToF)是当前主流的方案。双目视觉通过模拟人眼视差实现深度感知,结构光通过投射编码光斑进行三维重建,而ToF则通过计算光线反射时间获取距离信息。相比于传统的2D视觉,3D视觉提供了更加丰富和可靠的空间信息,帮助机器人在复杂的场景中自如行动。 人形机器人的视觉系统还将进一步与其他传感器(如触觉、听觉)结合,实现多模态感知。这样的多元感知可以更全面地理解环境,提高机器人在复杂情境中的表现。为使传感器模块更加集成化与小型化,传感器和处理单元将朝着一体化方向发展。这将使人形机器人具备更高的灵活性与机动性,同时减少了多个传感器之间的通信成本。此外,大模型与具身智能的结合将显著提升视觉系统的认知与决策能力。通过海量数据的训练,视觉传感器可以识别更加复杂的信息,如分辨物体或判断用户意图,并生成自主决策。 人形机器人视觉传感器正经历从“被动感知”向“智能融合”的转型。随着3D视觉技术的成熟、以及AI算法的赋能,视觉系统将升级为主动决策的核心单元。然而,行业仍需在低成本化、标准化和跨平台兼容性上寻求突破。未来五年内,视觉传感器将推动人形机器人在工业自动化、家庭服务和特种作业等场景中实现规模化落地,开启人机协作的新纪元。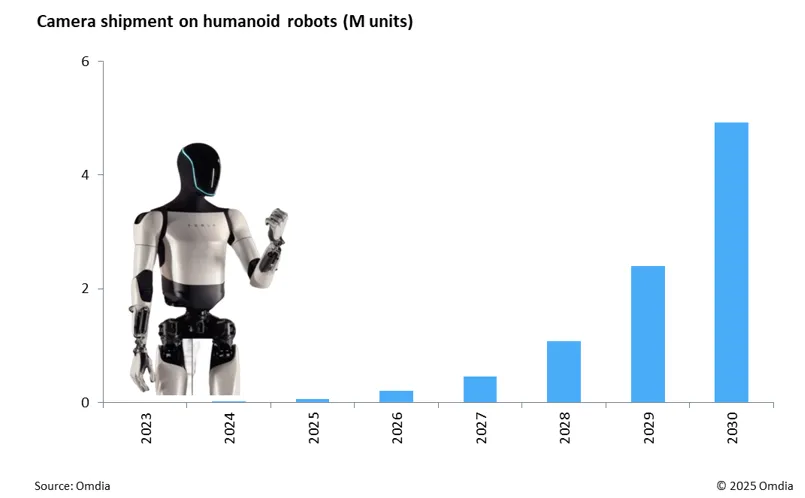
上一篇:从公路到草坪:意法半导体最新车规卫星导航芯片为赛格威割草机器人保驾护航
下一篇:又一手机大厂入局,vivo官宣进军家庭机器人市场
- 热门资源推荐
- 热门放大器推荐
 非常经典的关于LLC的杨波博士论文
非常经典的关于LLC的杨波博士论文 LMH6672LDX/NOPB
LMH6672LDX/NOPB
- REF196 精密微功率、低压差堆叠电压基准的典型应用电路
- LTC4367IMS8 用于滞后调节的过压电源控制器的典型应用
- CLRC663非接触式读写器IC的典型应用
- 使用 ON Semiconductor 的 CS-5621 的参考设计
- RSO-0515S 15V、67mA输出DC/DC转换器典型应用电路
- NCP51200 3 Amp VTT 终端稳压器 DDR1、DDR2、DDR3、LPDDR3、DDR4 的典型应用
- LR645大电流SMPS启动电路典型应用
- ADR420 可编程电流源的典型应用
- DC417B,使用 LT1806CS8 多尺寸单运算放大器原型的演示板
- DM300019,用于评估 dsPIC30F 和 dsPIC33F MCU 系列器件的 dsPICDEM 入门开发板

 XC6406PP60DL
XC6406PP60DL






 京公网安备 11010802033920号
京公网安备 11010802033920号