一、概述
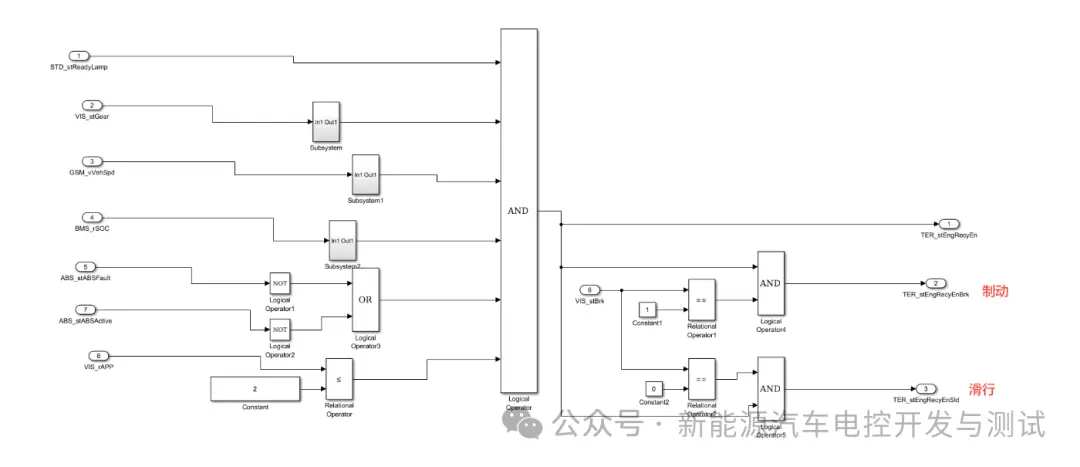
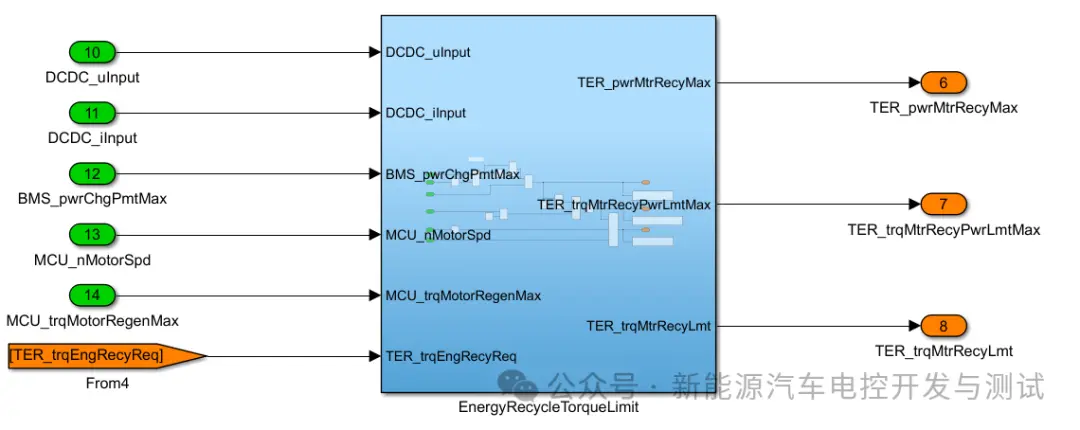
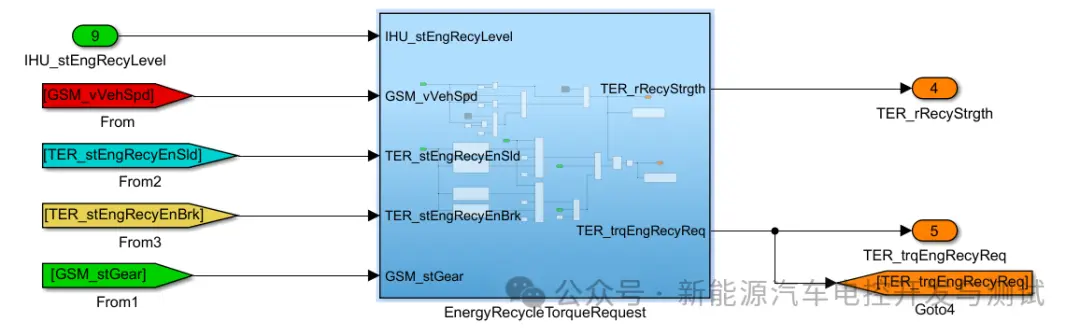
VCU(Vehicle Control Unit,整车控制器)能量回收功能是新能源汽车(如纯电动汽车和混合动力汽车)中非常重要的一个环节。它主要是在车辆减速或制动过程中,将车辆的部分动能转化为电能,并存储在电池中,从而提高车辆的能量利用效率。能量回收的本质是根据整车状态计算出能量回收扭矩(TER,TorqueEnergyRecovery并进行输出,可分为能量回收使能(EnergyRecycleEnable)、能量回收扭矩请求(EnergyRecycleTorqueRequest)和能量回收扭矩限制(EnergyRecycleTorqueLimit)三个子模块。 能量回收使能模块是指 VCU 根据整车上电状态、车速、挡位、电池 SOC 值、ABS 状态、加速踏板状态和刹车状态等来判断是否进行能量回收;能量回收扭矩请求模块是指 VCU确定进行能量回收后,根据能量回收等级、能量回收模式、当前车速和挡位计算出的能量回收扭矩值;能量回收扭矩限制模块主要从 DCDC 和电池所允许的最大充电功率、电机特性两个方面对能量回收扭矩进行限制。 VCU 能量回收功能规范的功能要求通常包括以下几个方面:能量回收策略制定与执行、能量回收效率优化、系统协同与安全保障 1)能量回收策略制定与执行 滑行能量回收:当驾驶员松开加速踏板,车辆进入滑行状态时,VCU 应能根据车速、电池 SOC(State of Charge,荷电状态)等条件判断是否开启能量回收。例如,在较高车速下(如大于 30km/h),如果电池 SOC 低于设定阈值(如 80%),则开启一定强度的滑行能量回收。回收强度可以根据车辆的设计和驾驶模式的不同而有所变化,一般可以通过调整电机的发电扭矩来实现不同程度的能量回收。 制动能量回收:在车辆制动过程中,VCU 需要协调制动系统和驱动电机,实现制动能量回收。它要区分机械制动和电制动的比例,这通常通过制动踏板传感器来获取制动意图。例如,在轻踩制动踏板时,优先使用电制动进行能量回收;当制动踏板行程较大,需要更大的制动力时,机械制动和电制动同时工作,并且随着制动强度的增加,机械制动的比例逐渐增大,电制动的比例相应减小,以保证车辆的制动安全。 2)能量回收效率优化 VCU 应确保能量回收系统具有较高的回收效率。这涉及到电机的发电效率、传动系统的能量传递效率以及电池的充电效率等多个环节。例如,电机在发电过程中会有能量损耗,一般高效的电机发电效率能达到 80% - 90% 左右。VCU 需要通过优化控制策略,如调整电机的转速 - 扭矩工作点,使电机工作在高效发电区域,从而提高整体的能量回收效率。同时,传动系统的设计也很关键,低摩擦的传动部件有助于减少能量损失。 3)系统协同与安全保障 与动力系统协调:VCU 要与驱动电机紧密配合。在能量回收过程中,驱动电机从驱动状态切换到发电状态,VCU 需要准确控制电机的扭矩反转时间和大小。例如,在从加速状态突然转换到滑行能量回收状态时,VCU 要确保电机扭矩的平稳过渡,避免车辆出现顿挫感。同时,对于混合动力汽车,还需要协调发动机和电机之间的工作模式,当发动机工作时,也要考虑如何合理地利用电机进行能量回收。 与电池管理系统协调:能量回收的电能要存储到电池中,VCU 需要和电池管理系统(BMS)通信。BMS 负责监控电池的状态,如电池温度、SOC 等。VCU 在进行能量回收时,要根据 BMS 提供的信息,判断电池是否能够接收回收的电能。例如,如果电池温度过高(如超过 45℃)或者 SOC 已经接近满电状态(如大于 95%),VCU 应该减少或停止能量回收,以保护电池的安全和寿命。 硬线信号 总线信号 部件功能说明 接口信号 1)输入量 2)输出量 3)标定量 滑行扭矩控制 滑行能量回收扭矩根据车速查表获得,在不同车辆模式下,需查不同的 Map以保障不同的动力性和经济性需求。为保证驾驶平顺性,低车速时回收扭矩较小,随车速增大回收扭矩逐渐增大,车速达到一定值后,滑行能量回收扭矩不再增大(滑行能量回收 Map 中体现)。 接口信号 1)输入量: 2)输出量: 3)标定量: 根据功能规范我们在Simulink中搭建模型 能量回收触发条件模型: 能量回收限制模块模型: 能量回收计算模块模型:
二、术语及缩写
英文缩写 英文全称 中文名称 VCU Vehicle Control Unit 整车控制器 BMS Battery Management System 电池管理系统 MCU Motor Control Unit 电机控制单元 ESC Electronic Stability Program 电子稳定系统 GSM Electronic Gear Select Module 电子换挡器 OBC On-Board Charger 车载充电机 BCM Body Control Management 车身控制系统 OBD On-Board Diagnostics 车载诊断系统 DCDC Direct Current Direct Current 直流-直流转换器 T-BOX Telematics BOX 远程信息处理器 EPS Electric Power Steering 电动助力转向 三、功能要求
四、系统组成
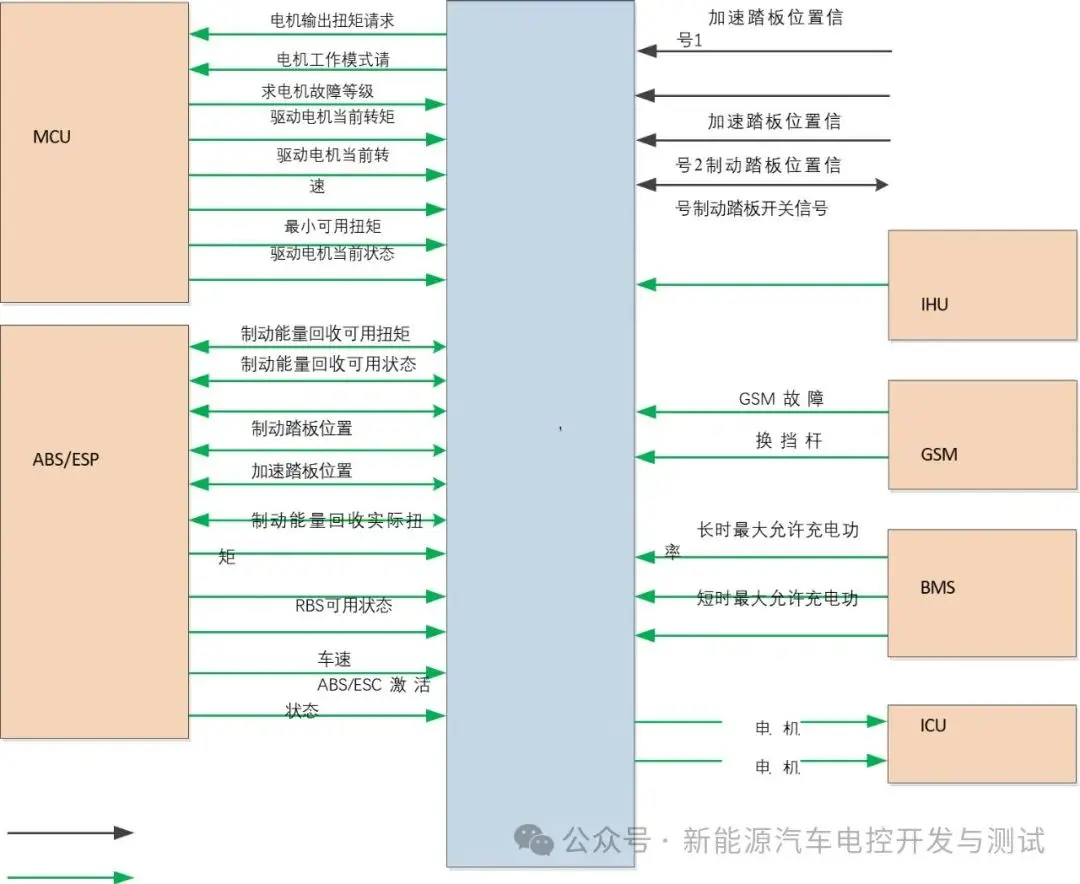
序号 部件名称 部件功能描述 1 VCU 接收档位信号,加速踏板行程信号,制动踏板开关信号,制动踏板位置信号与 BMS 反馈的高压电池系统状态,计算最大回馈扭矩,并通过总线发送至ABS/ESC 2 BMS 通过CAN 总线向VCU 反馈高压电池系统电压,SOC,最大充电电流等参数 3 MCU 执行VCU 请求扭矩,发送当前电机状态 4 GSM 发送换挡杆位置信息 5 ICU 接收VCU 发送电机功率信号并进行指示 6 ABS/ESC 根据VCU 反馈的系统回收能力参数,执行制动扭矩分配,计算电机回馈扭矩并发送至总线 7 IHU 驾驶员能量回收开关请求 4.1能量回收功能
4.11滑行能量回收
信号名称 通讯矩阵信号名称 信号描述 信号类型 VeCANR_b_RgnSwtch IHU_Regen_Switch 能量回收开关 CAN 信号 VeCANR_b_RgnSwtchVld IHU_Regen_Switch_Valid 能量回收控制开关有效性信号 CAN 信号 VeSGCR_b_AccnPedSt --- 加速踏板开度 内部信号 VeSGCR_pct_BrkPed --- 制动踏板开度 内部信号 VeSGCR_b_BrkPedSt --- 制动踏板状态 内部信号 VeGRMR_st_GrPstnOut VCU_ActualGearPosition 实际档位状态 CAN 信号 VeSGCR_v_VehSpd --- 车速 内部信号 VeCRUR_st_CruzMode --- 定速巡航模式 内部信号 VeTQRR_b_ACCTqCtrlActv --- ACC 功能激活 内部信号 VeTQRR_b_PASTqCtrlActv --- 自动泊车功能激活 内部信号 VeCANR_trq_MtrMinAvlTq MCU_MinAvlTq 电机最小可用扭矩 CAN 信号 VeCANR_Pwr_BatMaxChrgInstns BMS_AllowedMaxPeakFBPower 电池峰值回收功率 CAN 信号 信号名称 信号描述 信号类型 VeTQRR_trq_CstTqReq 滑行需求扭矩 内部信号 信号名称 信号描述 初始值(时间单位默认10ms) KeTQRR_Pwr_RgnAllwThres 回收允许电池功率阀值 20KW KeTQRR_trq_RgnAllwThres 回收允许电机扭矩阀值 80Nm KeTQRR_v_CstRgnEntSpd 滑行回收进入车速 8Km/h KeTQRR_v_CstRgnExtSpd 滑行回收退出车速 7Km/h KaTQRR_v_CstTqX 滑行扭矩 X 轴(车速) --- KaTQRR_trq_CstTqMap Nrm 模式滑行扭矩 Map --- Nrm 值 KaTQRR_trq_CstTqMapEco Eco 模式滑行扭矩 Map值 --- KaTQRR_trq_CstTqMapSpt Spt 模式滑行扭矩 Map值 --- KeTQRR_trq_CstBscTq 滑行基础扭矩 0Nm KaTQRR_fac_CstNom Nml 模式滑行回收系数 1 KaTQRR_fac_CstEco Eco 模式滑行回收系数 1 KaTQRR_fac_CstSpt Spt 模式滑行回收系数 1 KeTQRR_Pct_RgnBtSOCTres 能量回收的电池包 SOC阀值 98% 4.12制动能量回收
信号名称 通讯矩阵信号名称 信号描述 信号类型 VeCANR_b_RgnSwtch IHU_Regen_Switch 能量回收开关 CAN 信号 VeSGCR_pct_BrkPed --- 制动踏板开度 内部变量 VeSGCR_b_BrkPedSt --- 制动踏板状态 内部信号 VeGRMR_st_GrPstnOut --- 档位信号 内部信号 VeSGCR_v_VehSpd --- 车速 内部信号 VeCANR_trq_MtrMinAvlTq MCU_MinAvlTq 电机最小可用扭矩 CAN 信号 VeCANR_Pwr_BatMaxChrgInstns BMS_AllowedMaxPeakFBPower 电池峰值回收功率 CAN 信号 VeCANR_b_RBSActv ABS_RegenBrakeCtrlStatus RBS 功能激活 CAN 信号 VeCANR_trq_MtrTq MCU_MotorPresentTorque 电机扭矩 CAN 信号 信号名称 通讯矩阵信号名称 信号描述 信号类型 LeTQRR_trq_BrkTqReq -- 制动需求扭矩 内部信号 VeTQDR_trq_MtrRgnTqMax VCU_MotorOutputMinTqReq 电机回收可用扭矩 CAN 信号 信号名称 信号描述 初始值(时间单位默认10ms) KeTQRR_Pwr_RgnAllwThres 制动允许功率阀值 20KW KeTQRR_trq_RgnAllwThres 制动允许扭矩阀值 80Nm KeTQRR_v_BrkEntSpd 制动回收进入车速 7Km/h KeTQRR_v_BrkExtSpd 制动回收退出车速 1Km/h KeTQRR_Pct_RgnInBtSOCTres 能量回收允许的电池包SOC 阀值 98% KeTQRR_Pct_RgnExBtSOCTres 能量回收退出的电池包SOC 阀值 99% 4.2matlab搭建模型
上一篇:智能驾驶数据采集回注测评工具 - ARS
下一篇:面向教学科研的智能车设计及实践实验室
推荐阅读最新更新时间:2026-03-25 03:15

 汽车各种控制器简述(VCU、TCU、SCU、INS、MFS、BCM、IKEY、ESC、EPS、ESP、EPB、SAS等)
汽车各种控制器简述(VCU、TCU、SCU、INS、MFS、BCM、IKEY、ESC、EPS、ESP、EPB、SAS等) 现代雷达系统的信号设计
现代雷达系统的信号设计- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- VPU中的“六边形战士”:安谋科技Arm China发布“玲珑”V560/V760 VPU IP
- 利用锚定可信平台模块(TPM)的FPGA构建人形机器人安全

- 用于 7VIN 至 16VIN、1.5V 和 1.2V 输出的 LTM4628EV DC/DC 模块稳压器的典型应用电路
- 使用 Analog Devices 的 LTC3728LIGN 的参考设计
- DER-406 - 适用于 A19 灯的 5.76 W 高 PF 非隔离降压-升压型 TRIAC 调光 LED 驱动器
- ADR5045B 5V 输出精密微功率并联模式电压基准的典型应用
- LT3970EDDB-3.42 2.5V 降压转换器的典型应用
- MC78M08BDTG 8V 电流调节器的典型应用
- LT1021DCN8-5 精密电压基准的典型应用
- DER-282 - 100W, 扁平(11 mm), LLC DC-DC转换器
- REF193 低压差开尔文连接电压基准的典型应用电路
- LT3088EM 线性稳压器用于添加软启动的典型应用

 BFR340T
BFR340T- 海康机器人视觉检测方案守护光伏组件生产质量
- 艾利特CSF系列力控协作机器人来了!
- MTBF突破4万小时!这家工业级3D相机品牌产品稳定性获权威机构认可
- G20周刊|埃斯顿与北自所达成战略合作、海康机器人发布光伏组件汇流带视觉检测解决方案
- 14家工业智能企业入选《上海市智能机器人标杆企业与应用场景推荐目录》
- e络盟社区公布全球女性创客和工程师大赛获奖名单
- 低功耗、小尺寸、高可靠,Lattice Certus™-NX系列问市
- 豪威集团亮相SEMICON CHINA 2020 全面助力半导体“芯”生态
- MIT科学家最新研发紫外线机器人以用于空间自动消毒
- 2020上半年RPA投融盘点:8亿金额60亿估值,RPA第一梯队正式成型







 京公网安备 11010802033920号
京公网安备 11010802033920号