一、 RobotStudio创建机器人系统和工作站
RobotStudio 采用6.08.01版本
(1)导入机器人模型
ABB模型库导入机器人模型IRB5700。会弹出选择框,选择机器人的版本,选择一个,点击确定即可。操作完成,则RobotStudio的图形区域会出现机器人模型。
(2)创建机器人系统
选择基本—机器人系统—从布局,弹出从布局创建系统的对话框。
(3)机器人系统的配置
话不多说,直接给大家看机器人系统的配置。主要注意红色框中的内容。
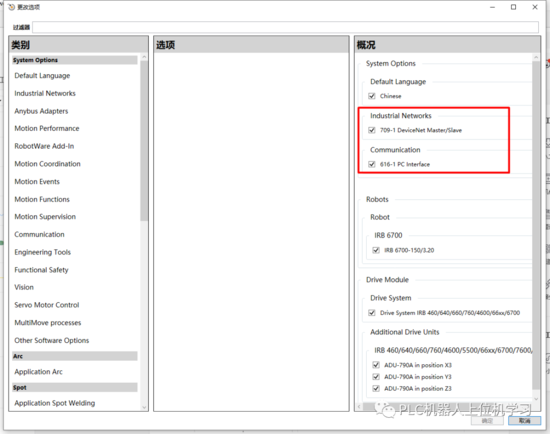
以上便是机器人系统的设置。
二、导入库文件
基本--导入模型库--浏览库文件
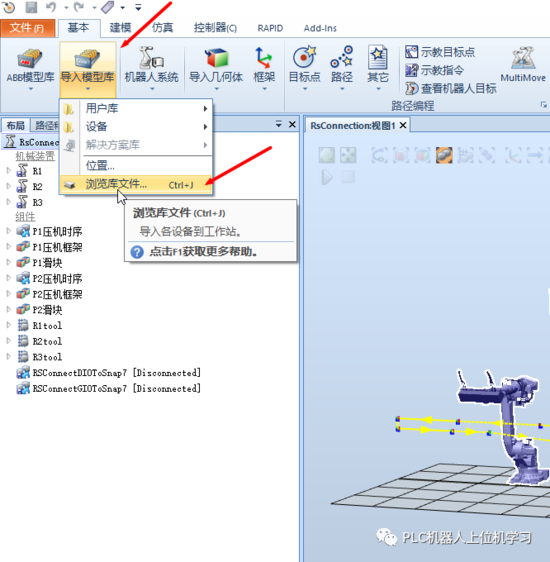
选中两个库文件,选择打开。
两个库文件,一个是DIO数字量通讯文件,另一个是GIO组变量通讯文件。在此要提一下,这个库文件是封装的TCP/IP通讯协议。后边要着重用到。

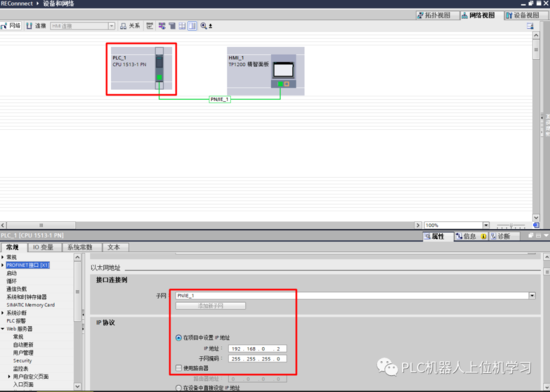
三、博图项目的建立
1、我添加的PLC是1500系列。因为使用PLCSIM Adv的时候仿真1500系列比较方便。
添加子网,设定PLC的IP地址192.168.0.2
2、创建虚拟PLC
打开PLCSIM Adv软件,创建一个PLC项目。IP和博图中一致192.168.0.2子网是255.255.255.0切记要选择OnlineAccess方式,具体原因看红框内。也就是前边提到ABB的两个库文件是通过TCP/IP协议实现通讯。

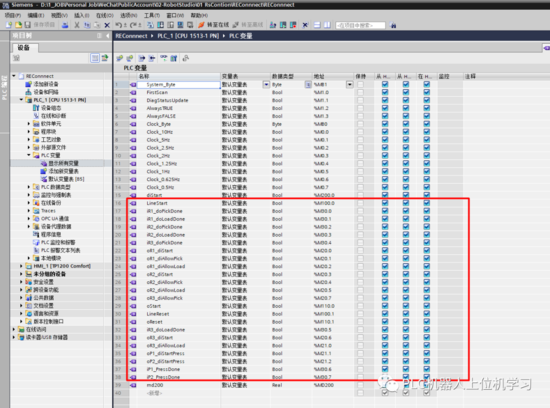
3、创建PLC变量表
以下是我此项目用到的变量。
四、创建PLC中的变量
1、 创建DeviceNet Device
控制器—配置—I/O System ,右键单击DeviceNet Device ,选择新建DeviceNet Device。
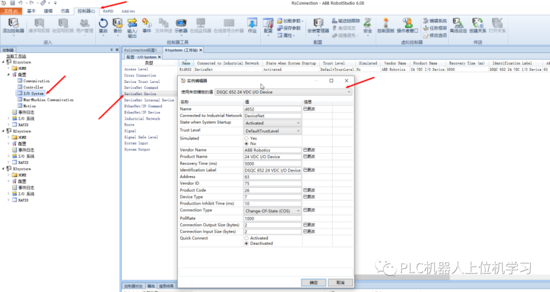
使用来自模板的值:DSQC 652 24VDC I/O Device
其余直接使用默认值就行,点击确定
弹出对话框,“提示控制器重启后更改才会生效”,点击确定,然后在控制器—重启—重启动(热启动),等待系统重启完成。
2、创建变量
控制器—配置—I/O System,右键选择Signal ,选择新建Signal ,弹出对话框.
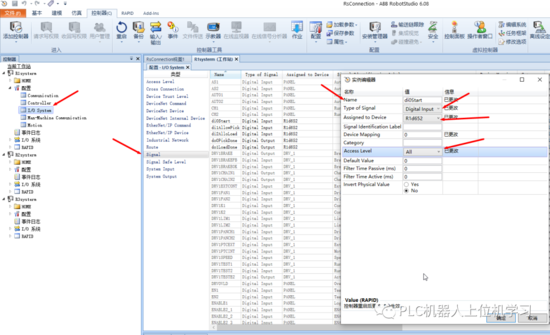
按照上图中的选项,将各机器人系统的输入输出变量进行添加,创建了数字输信号di0Start信号,该信号是Bool型的值,Meeping偏移值输入和输出都是从0开始,依次增加1。
弹出对话框提示“控制器重启后更改才会生效”,我是等所有信号添加完成后才进行的重启。
3、仿真通讯的连接
基本--右键“Snap7”文件--属性。打开如下窗口
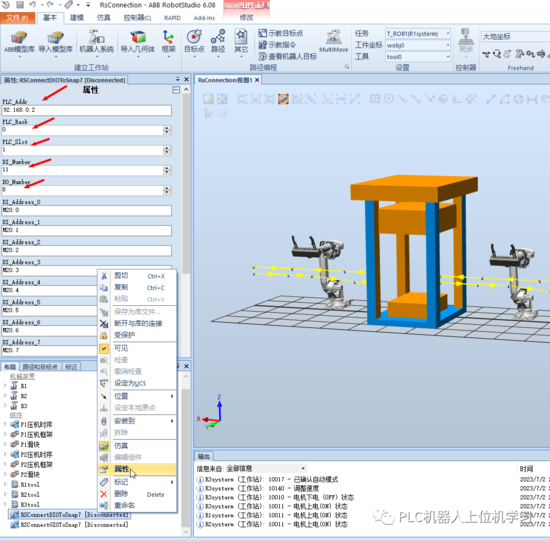
设定PLC的IP地址192.168.0.1.机架号,数字量输入输出的数量和对应的PLC中的地址。然后窗口最下方的Connection。就能实现连接。
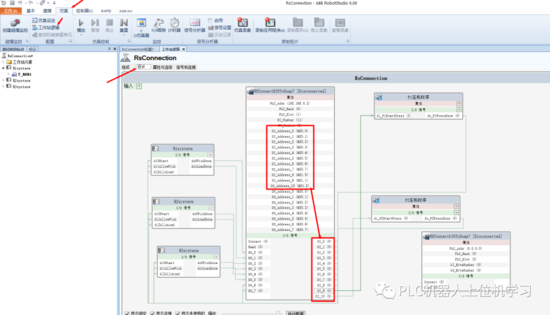
五、机器人IO和仿真信号的连接
选择仿真--工作站逻辑--设计。将仿真器的信号和各个机器人的IO信号进行对应连接。仿真器信号和各Smart组件之间进行信号关联。
上一篇:一种用于同步磁阻牵引电机的新型取向钢叠片转子铁心
下一篇:智能工业传感器节点的构筑,传感器也要为MCU分担任务
- 热门资源推荐
- 热门放大器推荐
 现代雷达系统的信号设计
现代雷达系统的信号设计 LM311M
LM311M
- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- VPU中的“六边形战士”:安谋科技Arm China发布“玲珑”V560/V760 VPU IP
- 利用锚定可信平台模块(TPM)的FPGA构建人形机器人安全

- BGA3015 - 5 至 300MHz、15dB 反向放大器应用
- led-panel:白光LED的LED面板分线板
- EVAL6480H,L6480 大功率步进电机驱动器演示板
- KIT33816FRDMEVM,MC33816 Freedom Board KL25Z 评估套件,喷油器
- STA333BW,用于数字音频功率放大器电视和便携式应用的评估板
- 使用 Analog Devices 的 LTC1439CG 的参考设计
- 使用 2 速时钟的 7.5us 模数转换器
- LDK130C33R 3.3V、300 mA 低静态电流、极低噪声 LDO 的典型应用固定版本电路
- LX7172、1.4MHz、1.2A 同步降压转换器的典型应用
- MIC2755 的典型应用:电池系统监控器

 BFR340T
BFR340T






 京公网安备 11010802033920号
京公网安备 11010802033920号