在现代汽车电子控制单元(ECU)的诊断系统中,时间控制是确保诊断通信可靠性、故障管理准确性的核心技术,如同交响乐团需要精确的节拍器,诊断系统的各个层级——从底层的帧传输到高层的服务处理——都依赖精心设计的时间参数协同工作,这些时间参数被系统地组织在传输层、网络层、会话层和应用层中,形成了一个完整的时序控制体系。本文将深入解析诊断系统中各层时间参数的概念、作用与实际应用,通过具体场景展示这些“数字节拍器”如何指挥诊断通信的每一个过程。
01 诊断系统的四层时间参数架构
汽车诊断系统的时间参数按照功能层次可分为四个层级,形成了一个完整的时间控制体系: 这种分层设计遵循了ISO 14229(UDS)和ISO 15765(诊断通信)标准,每一层专注于特定粒度的时序控制,共同保障诊断通信的端到端可靠性。 02 传输层时间参数: 数据帧的精准调度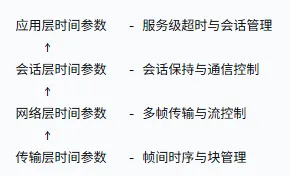
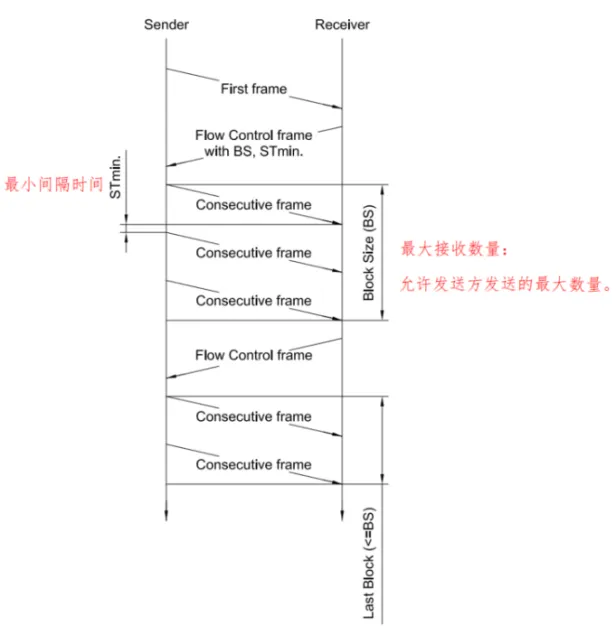
2.1 AM(地址模式) AM并非严格的时间参数,而是决定通信时序基础的重要模式,它定义了诊断消息的寻址方式: --物理寻址(1对1通信):ECU响应快,时序可预测; --功能寻址(1对多广播):响应时间需考虑多个ECU,时序更复杂。 AM决定了后续所有时间参数的基准,比如在功能寻址下,P2时间参数需设置更长,以容纳多个ECU的并行处理。 2.2 BS(块大小)与STmin(最小分隔时间) BS(与STmin这对参数是多帧传输的“流量调节阀”。BS是接收方告知发送方“每次最多给我发多少帧,然后等我确认”;STmin是接收方要求“每帧之间至少间隔多长时间,我好消化”。 比如BS=0表示发送方可连续发送所有数据(无流量控制),而BS=1-255,则每次最多发送指定帧数,然后等待流控制帧;STmin=0-127ms表示具体的最小间隔要求,而当STmin=0x7F,则表示发送方自行决定间隔。 Source:https://blog.csdn.net/LOVE135149/article/details/122621694 为了更好地理解BS和STmin,我们通过一个ECU软件刷写场景来做进一步了解: 假设诊断仪需要发送200帧刷写数据,然后ECU回复流控制帧:BS=10, STmin=5ms,那么发送流程将是这样的: 1. 诊断仪连续发送10帧数据,每帧间隔≥5ms; 2. 发送完第10帧后,暂停发送,等待ECU确认; 3. ECU处理完数据后,发送新的流控制帧:BS=10, STmin=5ms; 4. 重复此过程,直至200帧全部发送完成。 这样的设计防止了快速发送方(诊断仪)淹没处理能力有限的接收方(ECU)。 03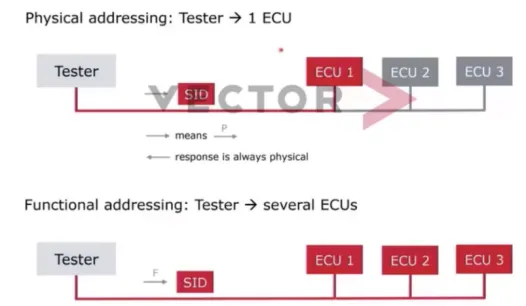
网络层时间参数: 多帧传输的守护者
网络层参数是多帧传输可靠性的核心保障,它们如同交通信号灯,控制着数据流的启停与节奏,这里需要关注六个网络时间参数N_As, N_Bs, N_Cs, N_Ar, N_Br和 N_Cr, 如下所示: Source: https://zhuanlan.zhihu.com/p/368091567 1)N_As(1000ms):发送方的“首帧耐心” N_As是指发送方发送首帧后,等待接收方回复流控制帧的最大时间。即发送首帧后启动1000ms定时器,如果收到流控制帧,则停止定时器,继续传输;如果1000ms超时,则认为接收方无响应,启动重传或报错。 比如某车型在寒冷启动时,ECU上电初始化较慢。诊断仪发送首帧请求读取故障码,ECU因低温启动,核心模块初始化需800ms。此时N_As设置为1000ms,ECU在900ms时完成初始化并回复流控制帧 ,那么传输成功;但若N_As设为500ms ,则 超时重传,这样就会增加网络负载,降低效率。 2)N_Bs(1000ms):块传输的“等待窗口” 当BS>0时,发送方发送完一个数据块后,等待下一个流控制帧的最大时间。 比如ECU设置BS=5,表示“每次给我5帧数据”,诊断仪发送完5帧后,启动N_Bs定时器(1000ms),ECU在600ms内处理完5帧数据,发送新的流控制帧,诊断仪收到后继续发送,整个流程顺畅;如果ECU处理异常,超过1000ms未回复,那么诊断仪N_Bs超时, 可能重传上一个数据块 ,以确保数据不丢失。 3)N_Cs:连续帧的“节奏控制” 实际发送连续帧时,帧与帧之间的时间间隔,这个值由发送方根据接收方要求的STmin决定,不是独立配置的参数。也就是说N_Cs ≥ STmin(必须满足接收方最低要求),并且这个时间间隔的实际值 = max(STmin, 物理层最小间隔),这两点发送方必须严格遵守,否则接收方可能缓冲区溢出。 4)接收方三剑客:N_Ar、N_Br、N_Cr 这三个参数构成接收方的超时防护网: N_Ar是指接收方发送流控制帧后,等待下一个连续帧的最大时间,通常为1000ms。即ECU发送流控制帧后启动N_Ar=1000ms,收到第一帧连续帧,停止N_Ar。 N_Br是接收方在开始接收一个数据块(最多BS个连续帧)后,等待该数据块完成的最大时间。N_Br计算公式:N_Br = BS × (单帧传输时间 + STmin) + 安全裕量,比如BS=5,STmin=10ms,CAN帧传输时间0.3ms,安全裕量50ms,那么N_Br = 5 × (0.3 + 10) + 50 = 101.5ms ≈ 100ms。 N_Cr是指接收方在发送流控制帧后,等待下一个连续帧的最大时间。N_Cr设置原则为:N_Cr = STmin + 网络最大抖动 + 处理波动,通常设为STmin的1.5-2倍。 04 会话层时间参数: 诊断会话的生命周期管理
UDS服务定义了诊断仪与ECU之间的请求-响应交互模式,在这一交互过程中,多个时间参数控制着通信的时序,在会话层主要涉及S3相关的时间参数。 4.1 S3Server(5000ms):ECU的“会话自动回收” ECU在非默认会话(如扩展会话、编程会话)中,无诊断活动时的最大保持时间。 即ECU进入扩展诊断会话(如刷写准备),启动S3Server定时器(5000ms倒计时);然后每次收到有效诊断请求,重置定时器;如果5000ms内无任何请求 ,则自动退回默认会话。 为什么这么设计?主要考虑点是非默认会话通常消耗更多资源(如内存、CPU),通过S3Server机制确保即使诊断仪异常断开,ECU也能自动释放资源,回归正常状态。 4.2 S3Tester(通常4000ms):诊断仪的“心跳保持” 诊断仪为保持非默认会话活跃,定期发送TesterPresent服务的时间间隔。即诊断仪进入编程会话(车辆软件升级),每4000ms发送一次TesterPresent(抑制响应),这确保在长达30分钟的刷写过程中,会话始终保持活跃。如果诊断仪崩溃停止发送,5秒后ECU自动退出编程会话 。 通常这两个时间参数存在的比例关系为S3Tester ≈ (0.7~0.8) × S3Server,这样在正常网络延迟下,确保诊断仪的“心跳”总能及时到达。 05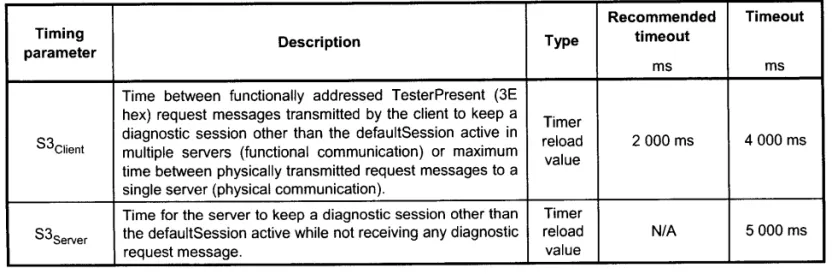
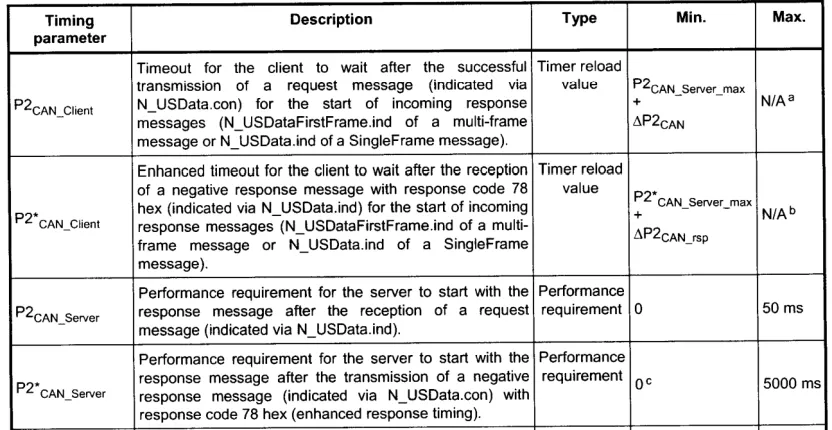
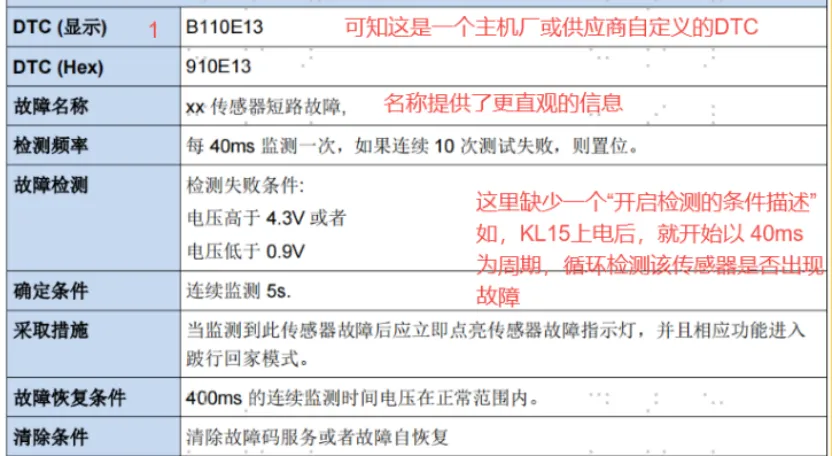
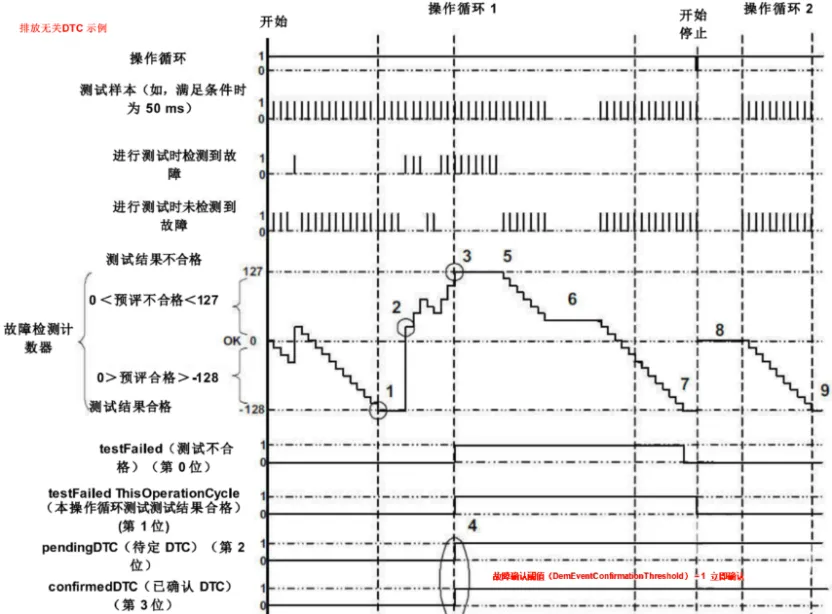
应用层时间参数: 诊断服务的质量保障 应用层时间参数,特别是P2系列参数,构成了诊断仪与ECU之间请求-响应时序的核心框架,定义了通信各方的行为边界接下来将深入解析四个关键的应用层时间参数:P2CAN_Client、P2*CAN_Client、P2CAN_Server和P2*CAN_Server。 为了理解这些参数的作用时机,让我们先看一个典型的诊断交互时序: P2参数正是用来约束这个响应时间范围的关键指标。 1)P2CAN_Server P2CAN_Server是ECU(服务器)从完整接收一个诊断请求消息,到开始发送响应消息之间的最大允许时间,这个时间一般设置为50ms。 这里对于单帧请求,完整接收是指收到完整的请求帧;而对于多帧请求,是指收到所有连续帧并完成重组后的完整请求数据;开始发送是指ECU开始向CAN总线发送响应消息的第一帧(可能是单帧或多帧的首帧)。 2)P2*CAN_Server 当ECU无法在P2CAN_Server时间内完成请求处理时,它可以先发送一个特殊的否定响应NRC 0x78(请求正确接收,响应尚未就绪),然后继续处理。P2*CAN_Server是ECU从发送NRC 0x78响应到准备好最终响应的最大允许时间,这个时间一般设置为5000ms。 P2*机制体现了诊断系统设计中的重要原则:当无法快速完成时,先确认接收,再异步处理。这避免了诊断仪因长时间等待而误判为超时。 3)P2CAN_Client P2CAN_Client是诊断仪(客户端)在成功发送请求消息后,等待ECU开始响应的最大时间,这个时间通常为P2CAN_Server_max + ΔP2CAN。 这里'成功发送请求消息'是指诊断仪已将请求消息完整发送到CAN总线上,并得到确认;'开始响应'是指检测到ECU开始发送响应消息,对于多帧响应是检测到首帧,对于单帧响应是检测到响应帧。 4)P2*CAN_Client 当诊断仪收到ECU返回的NRC 0x78否定响应时,它需要等待一段时间才能收到最终响应或重新发送请求。P2*CAN_Client就是诊断仪在收到NRC 0x78响应后,等待ECU开始发送最终响应的最大时间。这里不难理解时间起点是诊断仪完整接收到NRC 0x78响应帧的时刻,开始发送最终响应是指ECU开始发送处理完成后的最终响应。 06 DTC时间参数: 故障管理的时序智慧 除了上述这些时间参数,DTC相关时间参数是诊断系统的重要组成部分,包括故障确认时间,故障恢复时间和老化相关参数等。 1)故障检测时间参数 故障检测不是瞬时过程,需要一定时间来确认故障的真实性和稳定性。 故障确认时间(Fault Confirmation Time):从故障条件首次满足到ECU确认故障存在所需的时间,这个时间通过去抖动(debounce)算法实现,防止瞬时干扰导致误报。 故障恢复确认时间(Fault Recovery Confirmation Time):从故障条件消失到ECU确认故障已恢复所需的时间,这确保了间歇性故障不会立即被清除,避免状态频繁切换。 这样通过这两个时间的应用,可以提高故障检测的可靠性和准确性,减少误报和漏报。不同的故障类型可能具有不同的确认时间,例如: 电气短路:10-50ms(快速检测,防止损坏) 信号漂移:1-2s(避免误报,传感器需要稳定时间) 通信丢失:200-500ms(区分瞬时干扰与真实丢失) 总之,ECU软件为每个DTC配置适当的确认时间,通常使用计数器或定时器实现: 故障条件满足时,启动确认定时器 如果故障条件持续满足达到确认时间,则确认故障 故障条件消失时,启动恢复确认定时器 如果故障条件持续不满足达到恢复时间,则确认故障恢复 Source: https://blog.csdn.net/WE_BIG/article/details/135860897 比如当进行发动机失火故障检测,第1次检测到失火事件,启动500ms定时器,但不记录故障;如果500ms内再次检测到失火,确认为真实故障,设置DTC;如果500ms内未再检测到,则认为是瞬时干扰,忽略。 2)DTC存储时间参数 DTC被确认后,ECU需要决定何时将其存储到非易失性存储器中。 立即存储:某些严重故障(如安全相关故障)在确认后立即存储,确保即使ECU断电,故障信息也不会丢失。 延迟存储:非严重故障可能在点火循环结束时存储,减少对非易失性存储器的写操作,延长其寿命。 存储重试间隔:如果存储操作失败,ECU重试存储的时间间隔。 这样通过不同的存储时间来平衡故障信息的及时保存与存储器寿命保护的需求。 3)故障老化参数 DTC不会永久存储在ECU中,而是会在一定条件下自动清除,比如采用老化计数器(Aging Counter)记录DTC自上次发生以来的时间或事件次数。 常见的老化条件包括: 点火循环次数:故障不再发生后经过一定数量的点火循环 行驶里程:故障不再发生后车辆行驶一定距离 时间:故障不再发生后经过一定时间 老化阈值:老化计数器达到此阈值时,DTC被自动清除。不同严重等级的DTC可能有不同的老化阈值。 通过这里参数就可以检测老化是否激活,依次自动清理历史故障信息,防止存储器被旧故障码占满,同时确保近期故障信息可供分析。 07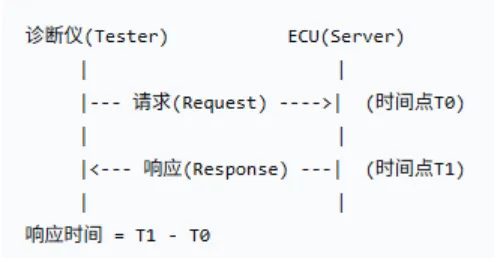
结 语 汽车ECU诊断系统的时间参数,看似是一组冰冷的数字,实则是确保诊断通信可靠、故障管理准确的智慧结晶。从传输层的毫秒级帧控制,到应用层的秒级服务管理,再到DTC的日级生命周期,每一层参数都在其岗位上精确值守,共同维护着诊断系统的健康运行。 理解这些时间参数不仅需要技术知识,更需要系统思维。在实际工程中,它们不是孤立配置的选项,而是相互关联、动态平衡的有机整体。一个优秀的诊断系统设计者,应当像交响乐指挥一样,深刻理解每个“乐器”(参数)的特性,让它们在正确的时刻发出和谐的声音。 随着汽车电子架构的不断演进,时间参数的管理将面临新的挑战和机遇。但无论如何变化,对时间的精确掌控将始终是汽车诊断技术不可或缺的核心能力。只有深入理解这些时间参数的内涵与关联,才能在日益复杂的汽车电子世界中,构建出稳定、可靠、高效的诊断系统。
上一篇:泰克联合安立发布汽车以太网一致性测试完整方案, 一站式验证100BASE T1/1000BASE-T1
下一篇:BANF与芯科科技携手推出智能轮胎监测解决方案 实现“最后的模拟领域”的数字化转型
- 热门资源推荐
- 热门放大器推荐
 非常经典的关于LLC的杨波博士论文
非常经典的关于LLC的杨波博士论文 CLC5612IMX
CLC5612IMX
- 用于 7VIN 至 16VIN、1.5V 和 1.2V 输出的 LTM4628EV DC/DC 模块稳压器的典型应用电路
- 使用 Analog Devices 的 LTC3728LIGN 的参考设计
- DER-406 - 适用于 A19 灯的 5.76 W 高 PF 非隔离降压-升压型 TRIAC 调光 LED 驱动器
- ADR5045B 5V 输出精密微功率并联模式电压基准的典型应用
- LT3970EDDB-3.42 2.5V 降压转换器的典型应用
- MC78M08BDTG 8V 电流调节器的典型应用
- LT1021DCN8-5 精密电压基准的典型应用
- DER-282 - 100W, 扁平(11 mm), LLC DC-DC转换器
- REF193 低压差开尔文连接电压基准的典型应用电路
- LT3088EM 线性稳压器用于添加软启动的典型应用

 XC6406PP60DL
XC6406PP60DL






 京公网安备 11010802033920号
京公网安备 11010802033920号